雖說 GoPiGo 可以用八顆『 AA 電池』
AA battery
The AA battery—also called a double A or Mignon (French for “dainty”) battery—is a standard size single cell cylindrical dry battery. The IEC 60086 system calls it size R6, and ANSIC18 calls it size 15.[1] Historically, it is known as HP7 in official documentation the United Kingdom, though it is colloquially known as a “double A battery”.
AA batteries are common in portable electronic devices. An AA battery is composed of a single electrochemical cell that may be either a primary battery (disposable) or a rechargeable battery. The exact terminal voltage and capacity of an AA size battery depends on cell chemistry; however, devices designed for AA will usually only take 1.5 V unless specified by the manufacturer.
Introduced in 1907,[2] the AA battery size was standardized by the American National Standards Institute (ANSI) in 1947, but it had been used in flashlights and electrical novelties for some time before formal standardization. ANSI and IEC Battery nomenclature gives several designations for cells in this size, depending on cell features and chemistry.

AA cells
來操作,基於目的、費用、使用時間長短,務需慎選也。之前作者曾用可充電式『鎳氫電池』,美則美矣,不過充電耗時太長,而且大容量電池太貴。今已量得 Raspberry 3B + WiFi + Camera 至少需要 5V/0.5A 以上功率!尚不及於馬達、伺服機制、CPU/GPU 消耗 …… 等等的哩!!
3. Power Up
In this page, we walk you through how to power your GoPiGo.
There are three ways to power the GoPiGo:
1. Using 8 xAA batteries
These are the best option when powering the GoPiGo, and comes with the base kit. With good rechargeable batteries, when running the GoPiGo on 8xAA batteries, you can expect the GoPiGo to run for over an hour.
To power the GoPiGo with AA batteries:
- Locate the power connector on the GoPiGo.
- Slide the battery adapter connector on to the white plug.
- Toggle the power switch to turn on the GoPiGo. The power LED will turn on.


2. Using USB Micro cable
You can use a USB Micro adapter to power the GoPiGo from the Raspberry Pi. This is useful when you are programming and debugging the GoPiGo. Remember that the motors and high powered sensors won’t run when you are only powering the GoPiGo via Micro USB. You must have the batteries connected in order for the motors and sensors to work!

3. Using a custom power supply
If you are more advanced, you can try using a custom power supply between 9V and 12V with a rating of 2A or above to power the GoPiGo. Creating your own custom power supply can be useful if you want to test the GoPiGo with all it’s functionality over a long period of time. The GoPiGo does not have reverse polarity protection in its power supply: create your own custom power source at your own risk.
Don’t forget to turn on the power switch on the GoPiGo when you start using it.
Have a question? Go check out our support page here or post it on the forums here.
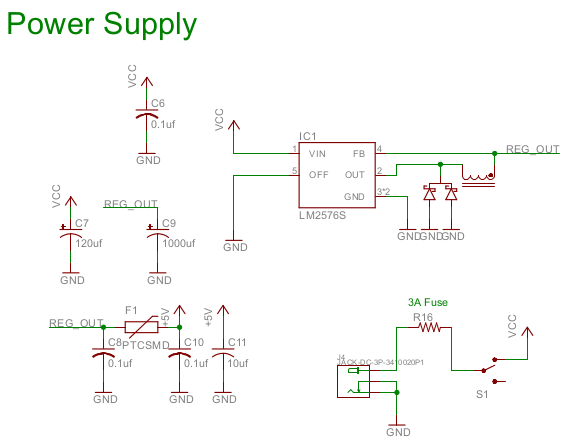
因此突發奇想查核電路︰
,驗證 USB 『行動電源』乎?
……
『八腳章魚』的作法,打算直接用『行動電源』
USB Battery Pack for Raspberry Pi – 10000mAh – 2 x 5V outputs

Description
A large-sized rechargeable battery pack for your Raspberry Pi (or Arduino, or Propeller, or anything else that uses 5V!). This pack is intended for providing a lot of power to an GPS, cell phone, tablet, etc but we found it does a really good job of powering other miniature computers and micro-controllers. If you want something a little smaller, we have a 4400mAh power pack with one USB port that can provide up to 1A We tested it with an iPad mini, iPad 1 & 3 and iPhone 5 & 5s so we know it will charge those models.
Inside is a massive 10,000mAh lithium ion battery, a charging circuit (you charge it via the USB cable attached), and two boost converters that provide 5VDC, 1A and 2A each via a USB A port. (The markings indicate one is good for 1A and one is good for 2A) The 2A output is best for charging tablets or other really power-hungry devices. But either can be used for when you want to power a Beagle Bone or Raspberry Pi, wifi adapters, maybe even small displays. We hooked it up to a 2.5″ NTSC display (powered from the Pi’s 5V breakout lines), wireless keyboard/mouse and a small WiFi dongle and it hummed along just fine as a mini computing setup!
The charging circuit will draw 1A from a 5V supply (plug a microUSB connector into the pack and then to a computer or wall adapter). You can charge and power something at the same time but the output switches to the USB input when charging so the output voltage may fluctuate. Its not good as a ‘UPS’ power supply for an embedded linux board, although microcontrollers like Arduino may not care about the voltage drop as much. Also, there’s ~80% efficiency loss on both ends so if you charge it at 1A and draw 1A at the same time, the battery pack will eventually go empty. However, if you’re powering something thats 500mA or less, you can keep it topped up no problem. Also, when you start and stop charging the pack, it will flicker the output, this can cause a ‘power sensitive’ device like the Pi or an iPhone to reset on the power supply. If using it with a low current load, say under 100mA, the pack may ‘fall asleep’ – you can use this circuit to keep the pack awake
How long it will last depends a bit on what you have connected. We ran a ‘headless’ pi (no keyboard, mouse, display attached) with a mini WiFi adapter plugged into the USB port and pinged it once a second to keep the network connection from going to sleep and it lasted 15 hours. There is a 4-step LED charge status display which you can turn on/off with the button. However, the button is not a general on/off for the entire pack! There’s no way to turn off the pack, as long as something is plugged in, it will power it. If you need a USB power switch, check out this item
Comes with the battery pack and a micro-B cable that you can use for charging the pack or powering a device with a micro B port.
─── 摘自《樹莓派 0W 狂想曲︰ 不大聲以色《♪♪》》
熟料目前 OK 耶☆



![more .config/autostart/rfkill-autostart.desktop [Desktop Entry] Type=Application Name=rfkill unblock 0 自動啟動 Comment= X 完成設定後啟動 rfkill unblock 0 Exec=sh -c 'sudo rfkill unblock 0' pi@raspberrypi:~](http://www.freesandal.org/wp-content/ql-cache/quicklatex.com-b963eb1543b90c8142e943c024ecb916_l3.png "Rendered by QuickLaTeX.com")