
![]()
![]()
![]() 派︰昔有『 Thue 』者,其言曰︰
派︰昔有『 Thue 』者,其言曰︰
阿克塞爾‧圖厄【挪威語 Axel Thue】一位數學家,以研究丟番圖用『有理數』逼近『實數』問題以及開拓『組合數學』之貢獻而聞名。他於一九一四發表了『詞之群論問題』Word problem for group 啟始了一個今天稱之為『字串改寫系統』SRS String Rewriting System 的先河,如從現今的研究和發現來看,它與圖靈機的『停機問題』密切相關。上個千禧年之時,John Colagioia 用『Semi-Thue System』寫了一個『奧秘的』 esoteric 程式語言 Thue ,作者宣稱︰
Thue represents one of the simplest possible ways to construe 『constraint-based』基於約束 programming. It is to the constraint-based 『paradigm』典範 what languages like『 OISC 』── 單指令集電腦 One instruction set computer ── are to the imperative paradigm; in other words, it’s a 『tar pit』焦油坑.
,果然概念廣大能通天!!『 SRS 』卻是個『奧秘語言』??
![]() 生︰ 當真是︰ ☆★ 之火,可以燎原。能不精思實念乎?
生︰ 當真是︰ ☆★ 之火,可以燎原。能不精思實念乎?


 』的一般?!已經完全不像他的『白馬非馬論』了。
』的一般?!已經完全不像他的『白馬非馬論』了。
洛基的賭注 Loki’s Wager
洛基乃北歐神話中以『詐騙』著名之神。傳說他曾與矮人打賭卻輸了。當矮人們依約來『提頭』時,洛基說︰『沒問題』,但是必須依照『約定』,只能取走『他的頭』,而不能動著『他的脖子』。於是彼此開始『爭論』該如何的『切割』:有哪些部分雙方同意『是頭』;又有哪些部分認同『是脖子』。只是脖子的『結束點』和頭之『開始點』究竟『是哪裡』,互相一直無法『取得共識』。於是洛基終於保住著了他的頭。
── 摘自《M♪o 之學習筆記本《丑》控制︰【黑水北】當思恒念》
當『數理』失卻了『參考系』確定『概念』之意義;宛如憑空地述說著『群論』可以將一元多次方程式可解性的問題連繫起來,豈非囫圇吞棗乎?不知滋味之物要怎樣講耶??
且思『近』之『視角大』、『遠』之『視角小』是『歐式幾何』之『性質』嗎?
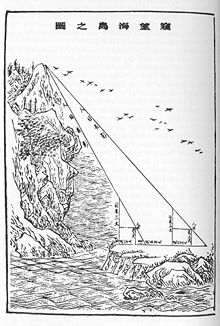
四庫全書海島算經







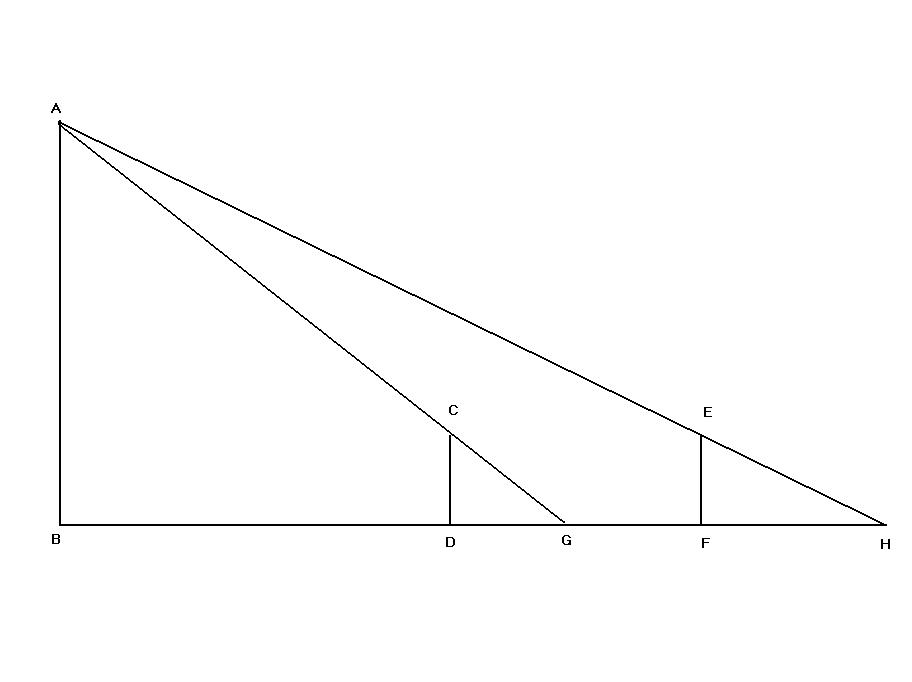
可以得到

然而『天很高,日很遠』,因此  ,故而很難『度量』的『精準』,一點點『角度』之『誤差』就產生了那個
,故而很難『度量』的『精準』,一點點『角度』之『誤差』就產生了那個
失之豪釐,差以千里
的吧!!
─── 摘自《失之豪釐,差以千里!!《上》》
難到『有限高度』  之物,若位在『無窮遠』
之物,若位在『無窮遠』  處,竟然它的『視角』 能不趨近於『零』
處,竟然它的『視角』 能不趨近於『零』  嗎??
嗎??
─── 《格點圖像算術《投影幾何》【一】》
人耳只有兩隻,卻足以聽音辨位,判別聲響來處︰
Direction of arrival
In signal processing literature, direction of arrival denotes the direction from which usually a propagating wave arrives at a point, where usually a set of sensors are located. These set of sensors forms what is called a sensor array. Often there is the associated technique of beamforming which is estimating the signal from a given direction. Various engineering problems addressed in the associated literature are:
- Find the direction relative to the array where the sound source is located
- Direction of different sound sources around you are also located by you using a process similar to those used by the algorithms in the literature
- Radio telescopes use these techniques to look at a certain location in the sky
- Recently beamforming has also been used in RF applications such as wireless communication. Compared with the spatial diversity techniques, beamforming is preferred in terms of complexity. On the other hand, beamforming in general has much lower data rates. In multiple access channels (CDMA, FDMA, TDMA), beamforming is necessary and sufficient
- Various techniques for calculating the direction of arrival, such as Angle of Arrival (AoA), Time Difference of Arrival (TDOA), Frequency Difference of Arrival (FDOA), or other similar associated techniques.
豈不叫人好奇!!
那麼兩耳之近,音速剛好不快,這個『三角‧時差』之法,怎能不為『初機』乎??
Tripp McGehee
Supervisor: Professor Arye Nehorai
Department of Electrical and Systems Engineering
Washington University in St. Louis
Spring 2007
Abstract
We implemented an acoustic sensor array on a mobile robotic device for estimating the location of a stationary target. Our goal was to build a robot that could adaptively locate and move towards a stationary sound source. We mounted an array of four omnidirectional microphones with their respective sound cards on a Lego Mindstorm. The measurements were transmitted to a computer through USB port and processed using Labview. As a first approach, we estimated the time differences of arrivals of the sound wave reaching each of the microphones for estimating the direction of the acoustic source relative to the robot. Then, the robot transmitted the command via USB to rotate towards the estimated direction of the sound. We addressed two major technical issues while implementing this project: sensor calibration and simultaneous sampling using four independent sound cards. The results of our first experiment in finding the direction of the acoustic source are encouraging. However, a more precise sampling control is required to enable implementing successfully more sophisticated algorithms, such as maximum likelihood estimation.
且借 ReSpeaker 4 Mic 略探『時差‧三角』法『假設』之旨也

_1.png)
_2.png)
_3.png)
※ 註
numpy.correlate
numpy.correlate(a, v, mode=’valid’)- Cross-correlation of two 1-dimensional sequences.
This function computes the correlation as generally defined in signal processing texts:
c_{av}[k] = sum_n a[n+k] * conj(v[n])with a and v sequences being zero-padded where necessary and conj being the conjugate.
Parameters: a, v : array_like
Input sequences.
mode : {‘valid’, ‘same’, ‘full’}, optional
old_behavior : bool
old_behavior was removed in NumPy 1.10. If you need the old behavior, use multiarray.correlate.
Returns: out : ndarray
Discrete cross-correlation of a and v.
See also
convolve- Discrete, linear convolution of two one-dimensional sequences.
multiarray.correlate- Old, no conjugate, version of correlate.
Notes
The definition of correlation above is not unique and sometimes correlation may be defined differently. Another common definition is:
c'_{av}[k] = sum_n a[n] conj(v[n+k])which is related to
c_{av}[k]byc'_{av}[k] = c_{av}[-k].
唯恐聲波還是跑得太快,『解析度』生疑焉??!!
故而 MIR
The autocorrelation of a signal describes the similarity of a signal against a time-shifted version of itself. For a signal  , the autocorrelation
, the autocorrelation  is:
is:

In this equation,  is often called the lag parameter.
is often called the lag parameter.  is maximized at
is maximized at  and is symmetric about .
and is symmetric about .
The autocorrelation is useful for finding repeated patterns in a signal. For example, at short lags, the autocorrelation can tell us something about the signal’s fundamental frequency. For longer lags, the autocorrelation may tell us something about the tempo of a musical signal.
筆記首重在『概念心法』,自也是『條件限定』的哩!!??