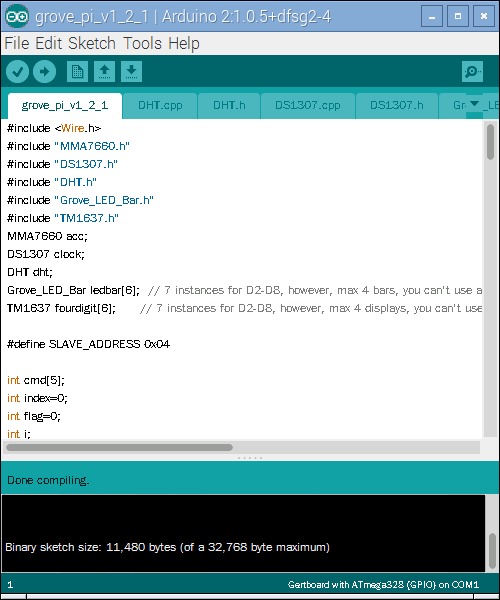
如今我們總算取得了『 GrovePi 』軟體架構
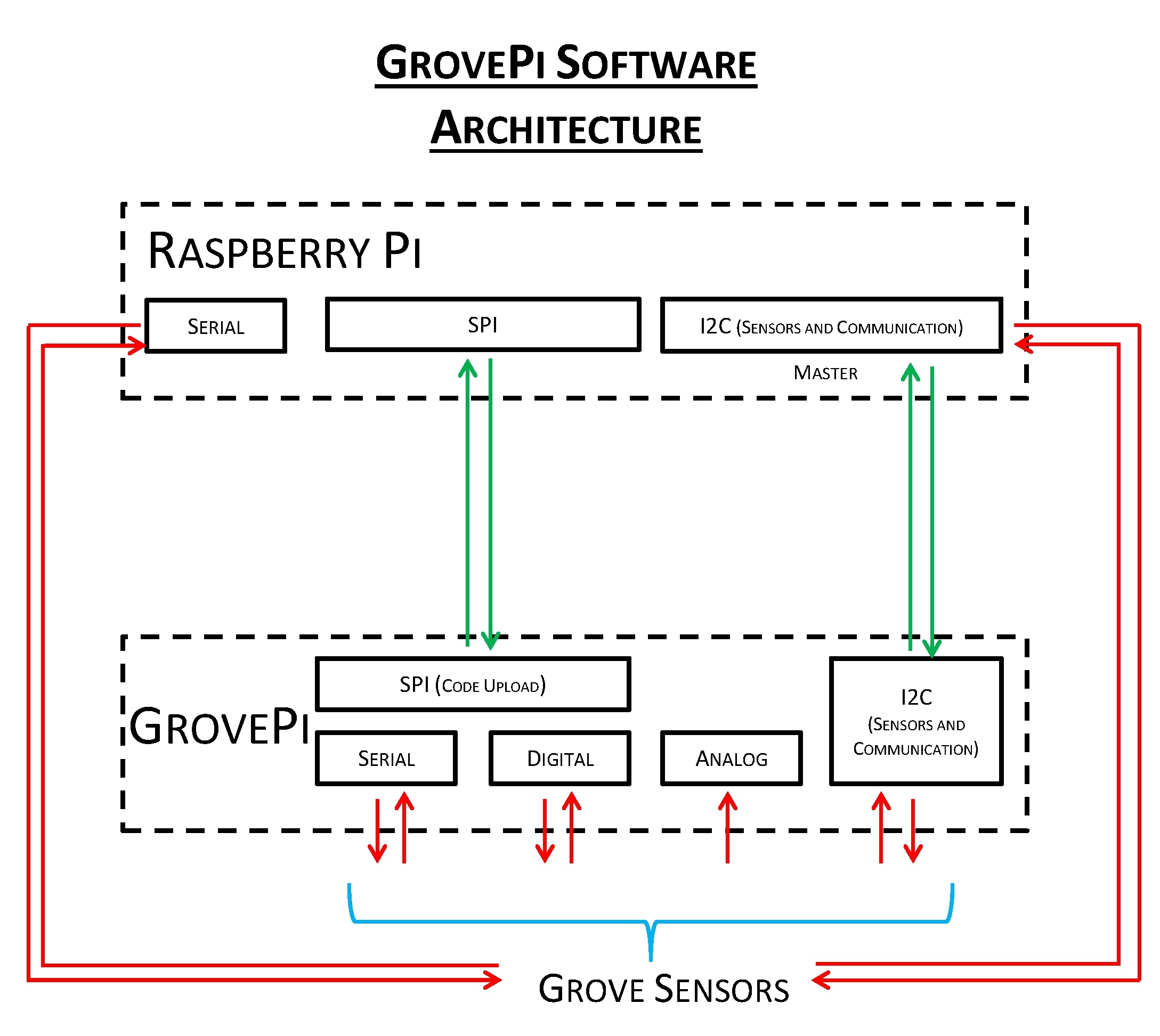
的第一塊關鍵拼圖 ──
韌體
韌體(firmware),是一種嵌入在硬體裝置中的軟體。通常它是位於特殊應用積體電路(ASIC)或可程式邏輯裝置(PLD)之中的快閃記憶體或EEPROM或PROM裡,有的可以讓使用者更新。可以應用在非常廣泛的電子產品中,從遙控器、計算機到電腦中的鍵盤、硬碟,甚至工業機器人中都可見到它的身影。
顧名思義,韌體的所在是位於軟體和硬體之間的。像軟體一樣,他是一個被電腦所執行的程式。然而它是對於硬體內部而言更加貼近以及更加重要的部份,而對於外在的世界而言較無重要的意義。
……
History
Ascher Opler coined the term “firmware” in a 1967 Datamation article.[4] Originally, it meant the contents of a writable control store (a small specialized high speed memory), containing microcode that defined and implemented the computer’s instruction set, and that could be reloaded to specialize or modify the instructions that the central processing unit (CPU) could execute. As originally used, firmware contrasted with hardware (the CPU itself) and software (normal instructions executing on a CPU). It was not composed of CPU machine instructions, but of lower-level microcode involved in the implementation of machine instructions. It existed on the boundary between hardware and software; thus the name “firmware”. Over time, popular usage extended the word “firmware” to denote anything ROM-resident, including processor machine instructions for BIOS, bootstrap loaders, or specialized applications.
Until the mid-1990s, updating firmware typically involved replacing a storage medium containing firmware, usually a socketed ROM integrated circuit. Flash memory allows firmware to be updated without physically removing an integrated circuit from the system. An error during the update process may make the device non-functional, or “bricked“, which the system is vulnerable to when the parts of flash storage containing the core software or update program are erased and reprogrammed. If the update process is interrupted abruptly, this core software may not be operational to run the device and retry the update, which can be avoided by having a protected read-only section of the flash storage that holds the core software. The downside for the manufacturer is that this read-only software cannot be corrected in the field, so it must be tested to a very high degree before the release.
───
或許到了轉進『韌體』之核心『概念』
韌帶
韌帶(拉丁語 Ligamenta,單數 Ligamentum)是可彎曲,纖維樣的彈性結締組織。
韌帶連接骨與骨,為明顯的纖維組織,或附於骨的表面或與關節囊的外層融合,以加強關節的穩固性,以免損傷,相對肌腱連接的是骨和肌肉;韌帶還是支持內臟,富有堅韌性的纖維帶,多為增厚的腹膜皺襞,使內臟固定於正常位置或限制其活動範圍;此外還有為某些胚胎器官的殘存遺蹟,如動脈導管韌帶。
韌帶來自於膠原。若韌帶超過其生理範圍地被彎曲(如扭傷),可以導致韌帶的延長或是斷裂。
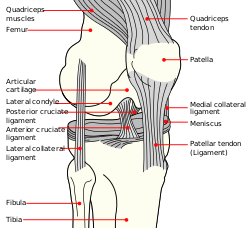
Diagram of the right knee.
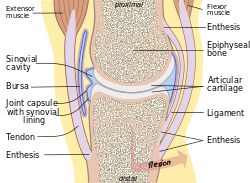
Typical joint
───
的時候了。將如何展開生物『韌帶』之『活性』的探索?使之可以『更新』、『重塑』、『鍛鍊』、…… 的哩!未來的『聰明物件』之『建構』和『解構』原理,又有什麼『人造物』有可以效法之『藍圖』呢??或許師法『自然』,『仿生學』正在起步的吧!!
務須審慎省思
有名萬物之母
《使女的故事》 The handmaid’s tale 是加拿大女性作家瑪格麗特‧愛特伍 Margaret Atwood 所寫的小說,受歐美文學界推崇不已的作品,已被列入重要經典作品中。
□︰數位的發展導致了一種疑慮,未來未必能『解碼』過去,那麼今天的存在,或許就成了『未知』的世紀??
○︰假使不必為『古人』擔憂!那又何必為『來者』遺憾?
即使將有『計算歷史學家』,或許也會遇到『可計算性問題』,可能不免『量子不確定性原理』,所謂的『當下』只在『前後』之『中』的吧!!
每一台 PC 主機板上都有一個『BIOS 』 Basic Input Output System 掌管開機動作。這個『第一啟動』韌體一直隱藏在『保密合約』 NDA non-disclosure agreement 幕後。曾經 Linux Bios 計畫努力於打開黑箱,直到今天稱之為 coreboot 。在那個應許的年代,已走入歷史的『 SUN Microsystems 』之『 Open Bios 』計畫裡的『 open firmware 』架構,就是『設備樹』的原點︰
《IEEE Std 1275-1994》
IEEE Standard for Boot (Initialization Configuration) Firmware: Core Requirements and Practices
……
3.2 Device tree
The device tree is a hierarchical data structure that describes the system hardware, describes user configuration choices, contains firmware device drivers for hardware devices, and contains support routines for use by those drivers.
The device tree’s structure mimics the organization of the system hardware, viewed as a hierarchy of interconnected buses and their attached devices. The device tree consists of a set of device nodes that are interconnected to form a tree. An individual device node
represents either a hardware bus, a hardware device, or a set of interrelated software procedures. ……
二零零八年起  Standard for Embedded Power
Standard for Embedded Power  Platform Requirements (ePAPR) 開始推廣 open firmware 架構︰
Platform Requirements (ePAPR) 開始推廣 open firmware 架構︰
……
1.2 Relationship to IEEETM 1275
The ePAPR is loosely related to the IEEE 1275 Open Firmware standard—IEEE Standard for Boot (Initialization Configuration) Firmware: Core Requirements and Practices [2].
The original IEEE 1275 specification and its derivatives such as CHRP [10] and PAPR [16] address problems of general purpose computers, such as how a single version of an operating system can work on several different computers within the same family and the problem of loading an operating system from user-installed I/O devices. ……
───
之『理念』,經常『得』『失』祇在『一念間』!!??
 cd src/
pi@raspberrypi ~/GrovePi-Test/src
cd src/
pi@raspberrypi ~/GrovePi-Test/src  cd ..
# 已刪除 Robot_Control 程式庫。編譯成功。
pi@raspberrypi ~/GrovePi-Test
cd ..
# 已刪除 Robot_Control 程式庫。編譯成功。
pi@raspberrypi ~/GrovePi-Test  avrdude -c gpio -p m328p -U flash:w:.build/uno/firmware.hex
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100% 0.00s
avrdude: Device signature = 0x1e950f
avrdude: NOTE: FLASH memory has been specified, an erase cycle will be performed
To disable this feature, specify the -D option.
avrdude: erasing chip
avrdude: reading input file ".build/uno/firmware.hex"
avrdude: input file .build/uno/firmware.hex auto detected as Intel Hex
avrdude: writing flash (16122 bytes):
Writing | ################################################## | 100% 8.84s
avrdude: 16122 bytes of flash written
avrdude: verifying flash memory against .build/uno/firmware.hex:
avrdude: load data flash data from input file .build/uno/firmware.hex:
avrdude: input file .build/uno/firmware.hex auto detected as Intel Hex
avrdude: input file .build/uno/firmware.hex contains 16122 bytes
avrdude: reading on-chip flash data:
Reading | ################################################## | 100% 8.16s
avrdude: verifying ...
avrdude: 16122 bytes of flash verified
avrdude: safemode: Fuses OK
avrdude done. Thank you.
pi@raspberrypi ~/GrovePi-Test
avrdude -c gpio -p m328p -U flash:w:.build/uno/firmware.hex
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100% 0.00s
avrdude: Device signature = 0x1e950f
avrdude: NOTE: FLASH memory has been specified, an erase cycle will be performed
To disable this feature, specify the -D option.
avrdude: erasing chip
avrdude: reading input file ".build/uno/firmware.hex"
avrdude: input file .build/uno/firmware.hex auto detected as Intel Hex
avrdude: writing flash (16122 bytes):
Writing | ################################################## | 100% 8.84s
avrdude: 16122 bytes of flash written
avrdude: verifying flash memory against .build/uno/firmware.hex:
avrdude: load data flash data from input file .build/uno/firmware.hex:
avrdude: input file .build/uno/firmware.hex auto detected as Intel Hex
avrdude: input file .build/uno/firmware.hex contains 16122 bytes
avrdude: reading on-chip flash data:
Reading | ################################################## | 100% 8.16s
avrdude: verifying ...
avrdude: 16122 bytes of flash verified
avrdude: safemode: Fuses OK
avrdude done. Thank you.
pi@raspberrypi ~/GrovePi-Test  i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: 03 -- 05 -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- 3e --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- 62 -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
pi@raspberrypi ~ $
i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: 03 -- 05 -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- 3e --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- 62 -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
pi@raspberrypi ~ $


 mkdir beep
pi@raspberrypi ~
mkdir beep
pi@raspberrypi ~  ino init -t blink
pi@raspberrypi ~/beep
ino init -t blink
pi@raspberrypi ~/beep  pi@raspberrypi ~
pi@raspberrypi ~  ls
lib manifest.ini src
pi@raspberrypi /usr/local/lib/python2.7/dist-packages/ino/templates/blink
ls
lib manifest.ini src
pi@raspberrypi /usr/local/lib/python2.7/dist-packages/ino/templates/blink  mkdir GrovePi-Test
pi@raspberrypi ~
mkdir GrovePi-Test
pi@raspberrypi ~  ino init -t grovepi
# 編譯 FAIL
pi@raspberrypi ~/GrovePi-Test
ino init -t grovepi
# 編譯 FAIL
pi@raspberrypi ~/GrovePi-Test ![ino build Searching for Board description file (boards.txt) ... /usr/share/arduino/hardware/arduino/boards.txt Searching for Arduino lib version file (version.txt) ... /usr/share/arduino/lib/version.txt Detecting Arduino software version ... 1.0.5 (2:1.0.5+dfsg2-4) Searching for Arduino core library ... /usr/share/arduino/hardware/arduino/cores/arduino Searching for Arduino standard libraries ... /usr/share/arduino/libraries Searching for Arduino variants directory ... /usr/share/arduino/hardware/arduino/variants Searching for make ... /usr/share/arduino/hardware/tools/avr/bin/make Searching for avr-gcc ... /usr/share/arduino/hardware/tools/avr/bin/avr-gcc Searching for avr-g++ ... /usr/share/arduino/hardware/tools/avr/bin/avr-g++ Searching for avr-ar ... /usr/share/arduino/hardware/tools/avr/bin/avr-ar Searching for avr-objcopy ... /usr/share/arduino/hardware/tools/avr/bin/avr-objcopy src/grove_pi_v1_2_5.ino Searching for Arduino lib version file (version.txt) ... /usr/share/arduino/lib/version.txt Detecting Arduino software version ... 1.0.5 (2:1.0.5+dfsg2-4) Scanning dependencies of src Scanning dependencies of arduino Scanning dependencies of Robot_Control Scanning dependencies of SD src/DHT.cpp src/DS1307.cpp src/Grove_LED_Bar.cpp src/TimerOne.cpp src/ChainableLED.cpp src/TM1637.cpp src/Encoder.cpp src/IRSendRev.cpp src/MMA7660.cpp src/grove_pi_v1_2_5.cpp Robot_Control/glcdfont.c Robot_Control/utility/twi.c Robot_Control/lcd.cpp Robot_Control/Motors.cpp Robot_Control/Sensors.cpp /usr/share/arduino/libraries/Robot_Control/Sensors.cpp: In member function 'void RobotControl::analogWrite(uint8_t, uint8_t)': /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:47:11: error: 'TKD4' was not declared in this scope if(port==TKD4) ^ /usr/share/arduino/libraries/Robot_Control/Sensors.cpp: In member function 'uint8_t RobotControl::_getTypeCode(uint8_t)': /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:64:8: error: 'TKD0' was not declared in this scope case TKD0: ^ /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:65:8: error: 'TKD1' was not declared in this scope case TKD1: ^ /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:66:8: error: 'TKD2' was not declared in this scope case TKD2: ^ /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:67:8: error: 'TKD3' was not declared in this scope case TKD3: ^ /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:68:8: error: 'TKD4' was not declared in this scope case TKD4: ^ /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:69:8: error: 'TKD5' was not declared in this scope case TKD5: ^ /usr/share/arduino/libraries/Robot_Control/Sensors.cpp: In member function 'uint8_t RobotControl::_topDPortToAPort(uint8_t)': /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:104:8: error: 'TKD0' was not declared in this scope case TKD0: ^ /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:106:8: error: 'TKD1' was not declared in this scope case TKD1: ^ /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:108:8: error: 'TKD2' was not declared in this scope case TKD2: ^ /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:110:8: error: 'TKD3' was not declared in this scope case TKD3: ^ /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:112:8: error: 'TKD4' was not declared in this scope case TKD4: ^ /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:114:8: error: 'TKD5' was not declared in this scope case TKD5: ^ /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:115:12: error: 'A11' was not declared in this scope return A11; ^ /usr/share/arduino/libraries/Robot_Control/Sensors.cpp: In member function 'int RobotControl::knobRead()': /usr/share/arduino/libraries/Robot_Control/Sensors.cpp:236:22: error: 'POT' was not declared in this scope return ::analogRead(POT); ^ .build/uno/Makefile:50: recipe for target '.build/uno/Robot_Control/Sensors.o' failed make: *** [.build/uno/Robot_Control/Sensors.o] Error 1 Make failed with code 2 pi@raspberrypi ~/GrovePi-Test](http://www.freesandal.org/wp-content/ql-cache/quicklatex.com-9c23adfabaceef7dd3bdd221d6d39e5d_l3.png "Rendered by QuickLaTeX.com")