設想如何在理論與計算上了解四軸飛行器呢?
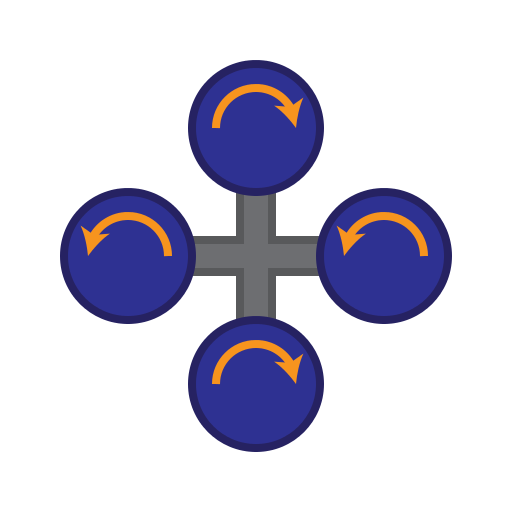
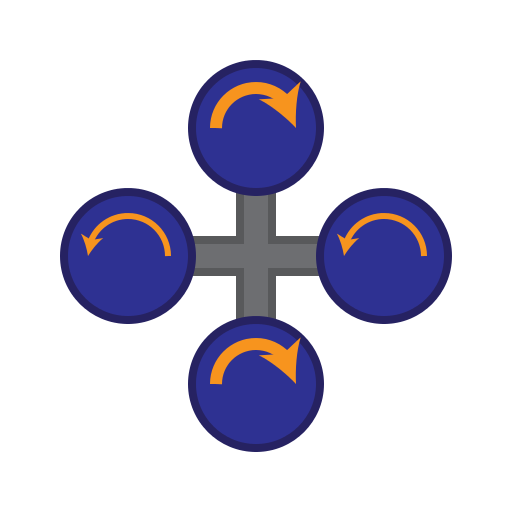
This shows the direction of travel for each propeller respective to the direction of travel. The red propellers are moving clockwise while the blue propellers are moving counterclockwise.
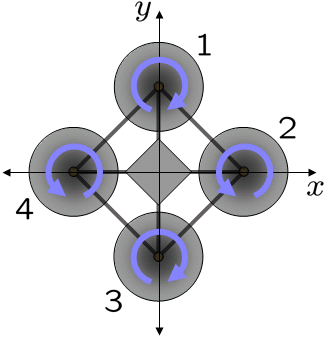
Schematic of reaction torques on each motor of a quadcopter aircraft, due to spinning rotors. Rotors 1 and 3 spin in one direction, while rotors 2 and 4 spin in the opposite direction, yielding opposing torques for control.
A quadrotor hovers or adjusts its altitude by applying equal thrust to all four rotors.
A quadrotor adjusts its yaw by applying more thrust to rotors rotating in one direction.
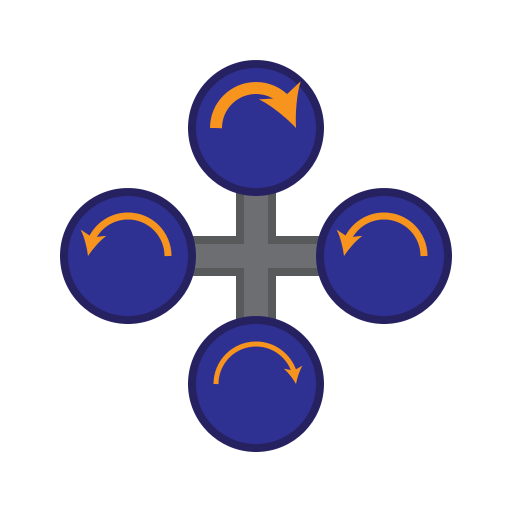
A quadrotor adjusts its pitch or roll by applying more thrust to one rotor and less thrust to its diametrically opposite rotor.
若已有一定的
力學
力學是物理學的一個分支,主要研究能量和力以及它們與物體的平衡、變形或運動的關係。
發展歷史
人們在日常勞動中使用槓桿、打水器具等等,逐漸認識物體受力,及平衡的情況。古希臘時代阿基米德曾對槓桿平衡、物體重心位置 、物體在水中受到的浮力等,作了系統研究,確定它們的基本規律 ,初步奠定了靜力學,即平衡理論的基礎。
自文藝復興之後,科學革命興起,伽利略的自由落體運動規律,以及牛頓的運動定律皆奠定了動力學的基礎。力學從此開始成為一門科學。此後彈性力學和流體力學基本方程的建立,使得力學逐漸脫離物理學而成為獨立學科。到20世紀初,在流體力學和固體力學中 ,實際應用跟數學理論的互相結合,使力學蓬勃起來,創立了許多新理論,同時也解決了工程技術中大量關鍵性問題。
古典力學及量子力學
若以發現的時間來看,古典力學較早被發現,啟源於牛頓的運動定律,量子力學則是20世紀初才由許多科學家所創立。
古典力學主要研究低速或靜止的宏觀物體。克卜勒、伽利略,尤其是牛頓是古典力學的奠基人。
量子力學應用範圍較廣,不過主要是針對微觀的物質。根據對應原理,量子數相當大的量子系統可以與古典力學中的行為模式相對應 ,使得量子力學及古典力學不會相衝突。量子力學可以解釋及預測分子、原子及基本粒子的許多行為。不過針對一般常見的巨觀系統 ,若使用量子力學會複雜到無法處理粒子間的交互作用,因此,巨觀系統透過古典力學的方式處理仍較為恰當。
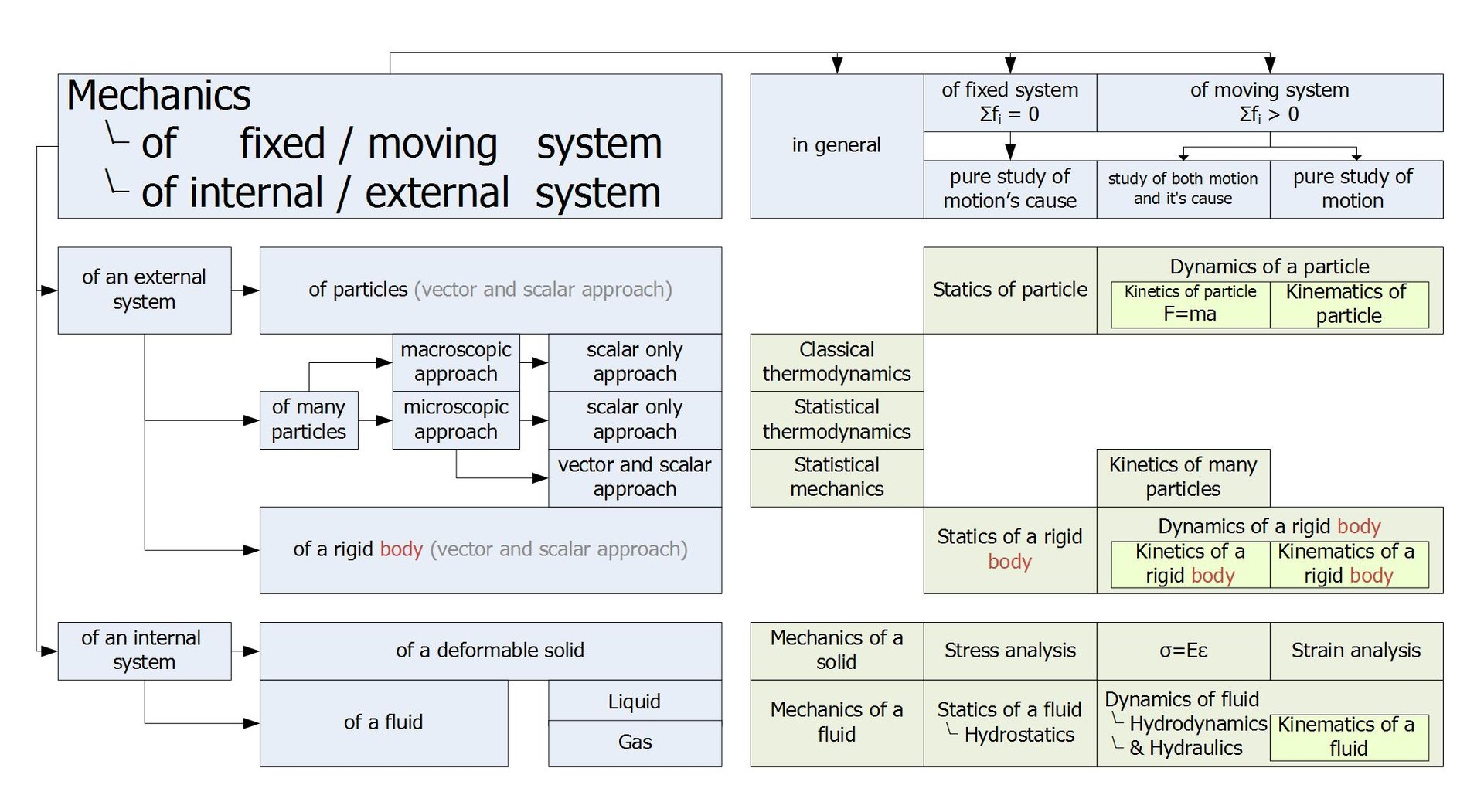
力學分支圖。
基礎,再輔之以 SymPy
Classical Mechanics
Abstract
In this documentation many components of the physics/mechanics module will be discussed. mechanics has been written to allow for creation of symbolic equations of motion for complicated multibody systems.
Vector
This module derives the vector-related abilities and related functionalities from physics.vector. Please have a look at the documentation of physics.vector and its necessary API to understand the vector capabilities of mechanics.
Mechanics
In physics, mechanics describes conditions of rest (statics) or motion (dynamics). There are a few common steps to all mechanics problems. First, an idealized representation of a system is described. Next, we use physical laws to generate equations that define the system’s behavior. Then, we solve these equations, sometimes analytically but usually numerically. Finally, we extract information from these equations and solutions. The current scope of the module is multi-body dynamics: the motion of systems of multiple particles and/or rigid bodies. For example, this module could be used to understand the motion of a double pendulum, planets, robotic manipulators, bicycles, and any other system of rigid bodies that may fascinate us.
Often, the objective in multi-body dynamics is to obtain the trajectory of a system of rigid bodies through time. The challenge for this task is to first formulate the equations of motion of the system. Once they are formulated, they must be solved, that is, integrated forward in time. When digital computers came around, solving became the easy part of the problem. Now, we can tackle more complicated problems, which leaves the challenge of formulating the equations.
The term “equations of motion” is used to describe the application of Newton’s second law to multi-body systems. The form of the equations of motion depends on the method used to generate them. This package implements two of these methods: Kane’s method and Lagrange’s method. This module facilitates the formulation of equations of motion, which can then be solved (integrated) using generic ordinary differential equation (ODE) solvers.
The approach to a particular class of dynamics problems, that of forward dynamics, has the following steps:
- describing the system’s geometry and configuration,
- specifying the way the system can move, including constraints on its motion
- describing the external forces and moments on the system,
- combining the above information according to Newton’s second law (F=ma), and
- organizing the resulting equations so that they can be integrated to obtain the system’s trajectory through time.
Together with the rest of SymPy, this module performs steps 4 and 5, provided that the user can perform 1 through 3 for the module. That is to say, the user must provide a complete representation of the free body diagrams that themselves represent the system, with which this code can provide equations of motion in a form amenable to numerical integration. Step 5 above amounts to arduous algebra for even fairly simple multi-body systems. Thus, it is desirable to use a symbolic math package, such as Sympy, to perform this step. It is for this reason that this module is a part of Sympy. Step 4 amounts to this specific module, sympy.physics.mechanics.
符號以及數值運算,難到不足哉!
單祇就 Kane 方法出處
Dynamics, Theory and Applications

ABSTRACT
DESCRIPTION
DATE ISSUED
1985
PUBLISHER
SUBJECT
PREVIOUSLY PUBLISHED AS
ISBN
TYPE
的前言︰
※ 註
Thomas R. Kane
Thomas R. Kane (born March 23, 1924) is Professor Emeritus of applied mechanics at Stanford University.[1] In the 1960s Kane devised a method for formulating equations of motion for complex mechanical systems that requires less labor and leads to simpler equations than the classical approaches, while avoiding the vagueness of virtual quantities. The method is based on the use of partial angular velocities and partial velocities.[2]
Biography
Professor Thomas R. Kane was born to Ernest and Gertrud Kanitz in Austria in 1924 and emigrated to the United States in 1938. His father was a musical composer and conservatory professor in Vienna who was able to obtain college-level teaching positions in the U.S. His mother’s correspondence with a family friend in France, as well as some serendipity, connected the Kanitz family to Dorothy Canfield Fisher, the renowned author and a director at the Quaker Oakwood school in Poughkeepsie (upstate New York). She sponsored Tom to attend the Oakwood school, receive a first-class education, and work summers doing language translation (Dr. Kane speaks German and English, and has at various times learned and used Russian, French, Spanish, and Portuguese). He attended Guilford college in NC for one year before enlisting during World War II.
Having held a part-time custodial job in photography was reason enough for him to be assigned from 1943-45 as a combat photographer in the South Pacific during World War II. He may the only person who witnessed both the inciting incident of, as well as the formal ending of, World War II, witnessing both Hitler’s invasion of Austria (March 12, 1938) and photographing the Japanese surrender aboard the USS Missouri in August 1945.
After the war, he attended Columbia University from 1946-1953 and earned a B.S. in Mathematics, a B.S. and an M.S. in Civil Engineering, and a Ph.D. in Applied Mechanics. After graduating, he spent 45 years teaching Mechanical/Aerospace Engineering at the University of Pennsylvania and Stanford University and gave lectures, seminars, and conferences in several languages around the world.
Dr. Kane has published 10 textbooks and 172 technical papers and is the preeminent expert and author of modern dynamics theory (known as “Kane Dynamics”).
In 1988, Dr. Kane joined Online Dynamics and was instrumental in the symbolic manipulator Autolev, providing technical leadership and vast amounts of documentation. In 1994, he became Professor Emeritus of Mechanics and Computation at Stanford Universityand founded Kane, Dynamics, Inc. a consulting company that, with Dr. Ken Chung, developed Animake, an animation program for Autolev and MotionGenesis.
Dr. Kane joined Motion Genesis as a Senior Consultant in 2010 to bring symbolic manipulation to engineers and the engineering classroom. Motion Genesis specializes in providing motion expertise to the bio-mechanical, legal, and defense industries.[3]
之所言,知其『實務匯通』難矣也!
那麼所謂 STEM
Science, technology, engineering, and mathematics
Science, Technology, Engineering and Mathematics (STEM), previously Math, Engineering, Technology, and Science (METS), is a term used to group together these academic disciplines.[1] This term is typically used when addressing education policy andcurriculum choices in schools to improve competitiveness in science and technology development. It has implications for workforce development, national security concerns and immigration policy.[1]
The acronym arose in common use shortly after an interagency meeting science education held at the US National Science Foundation chaired by the then NSF director Rita Colwell.[2] A director from the Office of Science division of Workforce Development for Teachers and Scientists, Peter Faletra, suggested the change from the older acronym METS to STEM. Colwell, expressing some dislike for the older acronym, responded by suggesting NSF to institute the change. One of the first NSF projects to use the acronym was STEMTEC, the Science, Technology, Engineering and Math Teacher Education Collaborative at the University of Massachusetts Amherst, which was funded in 1998.[3]
能是字母排列組合耶?