假使試著回答下列問題
‧ 同一觀察者使用不同『座標系』,運動現象之描述是否改變?
‧ 所有觀察者都同意『牛頓第二運動定律』  ?
?
‧ 『轉矩』是不是『向量』?
………
也許會發現『模糊的詞語』產生『摸稜兩可』之游移!
因此分辨『物理的…』或『數學的…』概念內涵以及差異,其實十分重要︰
Frame of reference
In physics, a frame of reference (or reference frame) consists of an abstract coordinate system and the set of physical reference points that uniquely fix (locate and orient) the coordinate system and standardize measurements.
In n dimensions, n+1 reference points are sufficient to fully define a reference frame. Using rectangular (Cartesian) coordinates, a reference frame may be defined with a reference point at the origin and a reference point at one unit distance along each of the n coordinate axes.
In Einsteinian relativity, reference frames are used to specify the relationship between a moving observer and the phenomenon or phenomena under observation. In this context, the phrase often becomes “observational frame of reference” (or “observational reference frame“), which implies that the observer is at rest in the frame, although not necessarily located at its origin. A relativistic reference frame includes (or implies) the coordinate time, which does not correspond across different frames moving relatively to each other. The situation thus differs from Galilean relativity, where all possible coordinate times are essentially equivalent.
Different aspects of “frame of reference”
The need to distinguish between the various meanings of “frame of reference” has led to a variety of terms. For example, sometimes the type of coordinate system is attached as a modifier, as in Cartesian frame of reference. Sometimes the state of motion is emphasized, as in rotating frame of reference. Sometimes the way it transforms to frames considered as related is emphasized as in Galilean frame of reference. Sometimes frames are distinguished by the scale of their observations, as in macroscopic andmicroscopic frames of reference.[1]
In this article, the term observational frame of reference is used when emphasis is upon the state of motion rather than upon the coordinate choice or the character of the observations or observational apparatus. In this sense, an observational frame of reference allows study of the effect of motion upon an entire family of coordinate systems that could be attached to this frame. On the other hand, a coordinate system may be employed for many purposes where the state of motion is not the primary concern. For example, a coordinate system may be adopted to take advantage of the symmetry of a system. In a still broader perspective, the formulation of many problems in physics employs generalized coordinates, normal modes or eigenvectors, which are only indirectly related to space and time. It seems useful to divorce the various aspects of a reference frame for the discussion below. We therefore take observational frames of reference, coordinate systems, and observational equipment as independent concepts, separated as below:
- An observational frame (such as an inertial frame or non-inertial frame of reference) is a physical concept related to state of motion.
- A coordinate system is a mathematical concept, amounting to a choice of language used to describe observations.[2] Consequently, an observer in an observational frame of reference can choose to employ any coordinate system (Cartesian, polar, curvilinear, generalized, …) to describe observations made from that frame of reference. A change in the choice of this coordinate system does not change an observer’s state of motion, and so does not entail a change in the observer’s observational frame of reference. This viewpoint can be found elsewhere as well.[3] Which is not to dispute that some coordinate systems may be a better choice for some observations than are others.
- Choice of what to measure and with what observational apparatus is a matter separate from the observer’s state of motion and choice of coordinate system.
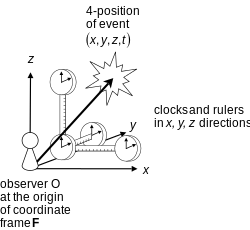
An observer O, situated at the origin of a local set of coordinates – a frame of reference F. The observer in this frame uses the coordinates (x, y, z, t) to describe a spacetime event, shown as a star.
…
藉著對比 SymPy 的兩套向量程式庫︰
Vector & ReferenceFrame
In vector, vectors and reference frames are the “building blocks” of dynamic systems. This document will describe these mathematically and describe how to use them with this module’s code.
Vector
A vector is a geometric object that has a magnitude (or length) and a direction. Vectors in 3-space are often represented on paper as:

Vector Algebra
Vector algebra is the first topic to be discussed.
Two vectors are said to be equal if and only if (iff) they have the same magnitude and orientation.
……
Introduction
This page gives a brief conceptual overview of the functionality present in sympy.vector.
Vectors and Scalars
In vector math, we deal with two kinds of quantities – scalars and vectors.
A scalar is an entity which only has a magnitude – no direction. Examples of scalar quantities include mass, electric charge, temperature, distance, etc.
A vector, on the other hand, is an entity that is characterized by a magnitude and a direction. Examples of vector quantities are displacement, velocity, magnetic field, etc.
A scalar can be depicted just by a number, for e.g. a temperature of 300 K. On the other hand, vectorial quantities like acceleration are usually denoted by a vector. Given a vector  , the magnitude of the corresponding quantity can be calculated as the magnitude of the vector itself
, the magnitude of the corresponding quantity can be calculated as the magnitude of the vector itself  , while the direction would be specified by a unit vector in the direction of the original vector,
, while the direction would be specified by a unit vector in the direction of the original vector,  .
.
For example, consider a displacement of  m, where , as per standard convention,
m, where , as per standard convention,  and
and  represent unit vectors along the
represent unit vectors along the  and
and  axes respectively. Therefore, it can be concluded that the distance traveled is
axes respectively. Therefore, it can be concluded that the distance traveled is  m
m  m. The direction of travel is given by the unit vector
m. The direction of travel is given by the unit vector  .
.
Coordinate Systems
A coordinate system is an abstract mathematical entity used to define the notion of directions and locations in n-dimensional spaces. This module deals with 3-dimensional spaces, with the conventional and axes defined with respect to each coordinate system.
Each coordinate system also has a special reference point called the ‘origin’ defined for it. This point is used either while referring to locations in 3D space, or while calculating the coordinates of pre-defined points with respect to the system.
It is a pretty well-known concept that there is no absolute notion of location or orientation in space. Any given coordinate system defines a unique ‘perspective’ of quantifying positions and directions. Therefore, even if we assume that all systems deal with the same units of measurement, the expression of vectorial and scalar quantities differs according to the coordinate system a certain observer deals with.
Consider two points  and
and  in space. Assuming units to be common throughtout, the distance between these points remains the same regardless of the coordinate system in which the measurements are being made. However, the 3-D coordinates of each of the two points, as well as the position vector of any of the points with respect to the other, do not. In fact, these two quantities don’t make sense at all, unless they are being measured keeping in mind a certain location and orientation of the measurer (essentially the coordinate system).
in space. Assuming units to be common throughtout, the distance between these points remains the same regardless of the coordinate system in which the measurements are being made. However, the 3-D coordinates of each of the two points, as well as the position vector of any of the points with respect to the other, do not. In fact, these two quantities don’t make sense at all, unless they are being measured keeping in mind a certain location and orientation of the measurer (essentially the coordinate system).
Therefore, it is quite clear that the orientation and location (of the origin) of a coordinate system define the way different quantities will be expressed with respect to it. Neither of the two properties can be measured on an absolute scale, but rather with respect to another coordinate system. The orientation of one system with respect to another is measured using the the rotation matrix, while the relative position can be quantified via the position vector of one system’s origin with respect to the other.
………
或能體會乎?