什麼是『微機電系統』 MEMS ?在此引用 State University of New York 之 Mohammad I. Younis 先生所寫
《 MEMS Linear and Nonlinear Statics and Dynamics 》
by
Mohammad I. Younis
書中之一段說法︰
1.1 What Are MEMS and Why They Are Attractive?
The easiest way to introduce MEMS is to refer to the acronym MEMS itself and what it means. MEMS stands for micro-electro-mechanical-systems. Hence, they are devices in the “micro” scale, in which one or more of their dimensions are in the micrometer range. The “electro” part indicates that they use electric power, for example for actuation and detection, or electronics, for instance for amplifying and filtering signals and for controlling purposes. “Mechanical” means these devices rely on some sort of mechanical motion, action, or mechanism. The word “system” refers to the fact that they function, are designed, and are fabricated as integrated systems and not as individual components. In addition to these features, there are some basic aspects of MEMS that are hidden in the acronym. These can be revealed in this more formal definition of MEMS, which is the integration of mechanical elements, sensors, actuators, and electronics on a common silicon substrate through micro-fabrication technology [1].
This concise definition emphasizes important features of MEMS. The first is the fact that most MEMS are basically sensors and actuators. Examples of MEMS sensors are inertia sensors (accelerometers, gyroscopes), pressure sensors, gas and mass sensors, temperature sensors, force sensors, and humidity sensors. Almost for every physical quantity, there is a MEMS sensor that is developed or being developed to measure it. Examples of actuators are micromirrors to deflect lights in flat-screen TVs, RF switches and microrelays, microgrippers, and generic force and displacement actuators, such as thermal bimorph actuators and comb-drive electrostatic actuators. Thus, historically speaking, the early generation of MEMS researchers
has relied on sensors and actuators journals and conferences to disseminate their research on miniature devices before the introduction of specialized MEMS conferences and journals in the early 1990s. Today, several major MEMS meetings and journals still hold the words sensors, actuators, or transducers in their titles.
The second feature is that silicon represents the core material of this technology. Silicon substrates are commonly used as the platform where MEMS components are built and electrically bonded, although recently other materials, such conductive polymers have been utilized [2, 3]. The fabrication of MEMS devices usually starts with single crystal silicon wafers, which come in many standard sizes (4 in, 8 in, and 12 in). Silicon is the preferred material because of its excellent thermal and mechanical properties (small thermal expansion, high melting point, high toughness, and brittleness with no plastic behavior or hysteresis). In addition, silicon has been used
for microelectronics long before the MEMS technology. Hence, many of the well-established processes to fabricate microelectronics from silicon have been adopted directly or modified slightly for MEMS. MEMS made of silicon can be integrated easily with other electronics components, which are also made of silicon, on the same chip. Besides silicon, a number of materials are used to realize MEMS structures, such as silicon-oxide, silicon-nitride, polysilicon, gallium arsenide (GaAs), aluminum, and gold. These are grown or deposited as thin-films over the silicon substrate, which are then etched or processed by micro-fabrication techniques [4].
Another key aspect of MEMS devices is the fact that they are made through the micro-fabrication technology, which enables fabricating numerous numbers of them at the same time (batch fabrication). Many of the micro-fabrication processes, such as material deposition, evaporation, and etching, can be applied on multiple silicon wafers at the same time. Each wafer can produce hundreds of MEMS devices. This means that each fabrication batch can produce thousands of MEMS devices all at once. Of course, reaching this level of production is not trivial; micro-fabrication processes need extensive research and optimization for each step to reach stable and reliable level of production. However, once this critical stage is passed, the payoff is thousands of devices at very low cost. MEMS devices have replaced many expensive devices for fractions of the cost. For instance, the Analog Devices airbag accelerometers in cars, which today costs less than a dollar, has replaced bulkier more expensive accelerometers, which cost more than US$ 50 apiece.
Another important feature of MEMS is the fact that they are systems. This implies that the components of MEMS have to be designed during the design of the whole system. Assembly of individual MEMS components is expensive, cumbersome, and impractical [5]. Also, when designing a microsystem, its fabrication process must be designed too, otherwise the design many not be feasible or cannot be fabricated. Another implication is that system issues, such as packaging, system partitioning into components, stability, and reliability of the products, must be analyzed and taken into consideration during the design and development cycles.
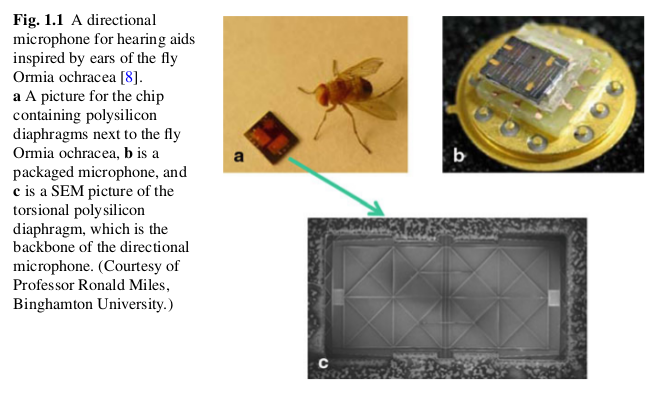
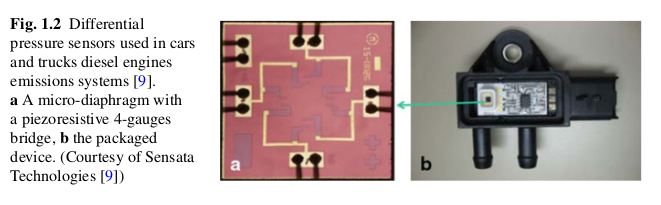
The fascination in the MEMS technology comes from their distinguished characteristics. MEMS are characterized by low cost, which is a direct consequence of the batch fabrication. They have lightweight and small size, which is desirable for compactness and convenience reasons. In addition, this has opened the gates for new possibilities of implementing MEMS in many places where large devices do not fit, such as engine of cars and inside the human body. Moreover, they consume very low power, which not only does reduce the operational cost but also enables the development of long-life and self-powered devices that can harvest the small amount of energy they need from the environment during their operation [6, 7]. Furthermore, MEMS devices have enabled many superior performances, smart functionalities, and complicated tasks that cannot be achieved in other technologies. Ultra-sensitive mass detectors, high isolation and low-insertion-loss RF switches, lab-on-a-chip bio-sensors, tiny directional microphones for hearing aids (Fig. 1.1), high-temperature pressure sensors for automobile engines (Fig. 1.2), and precise controlled liquid droplets for ink-jet printers are just few examples.
───
再輔之以
《 Microsensors, MEMS, and Smart Devices 》
by
Julian W. Gardner
University of Warwick, UK
Vijay K. Varadan
Osama O. Awadelkarim
Pennsylvania State University, USA
書中的『分類圖解』 Classification scheme 和 MEMS 可以量測哪些『物理量』,以及『裝置構造』概要︰
8.4 MECHANICAL SENSORS
8.4.1 Overview
Mechanical microsensors are, perhaps, the most important class of microsensor because of both the large variety of different mechanical measurands and their successful application in mass markets, such as the automotive industry. Table 8.4 lists some 50 or so of the numerous possible mechanical measurands and covers not only static and kinematic parameters, such as displacement, velocity, and acceleration, but also physical properties of materials, such as density, hardness, and viscosity.
Figure 8.19 shows a classification scheme for mechanical microsensors together with an example of a device type.
Table 8.4 List of mechanical measurands. Adapted from Gardner (1994)
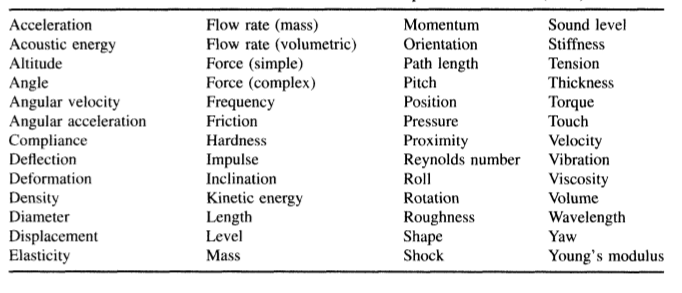
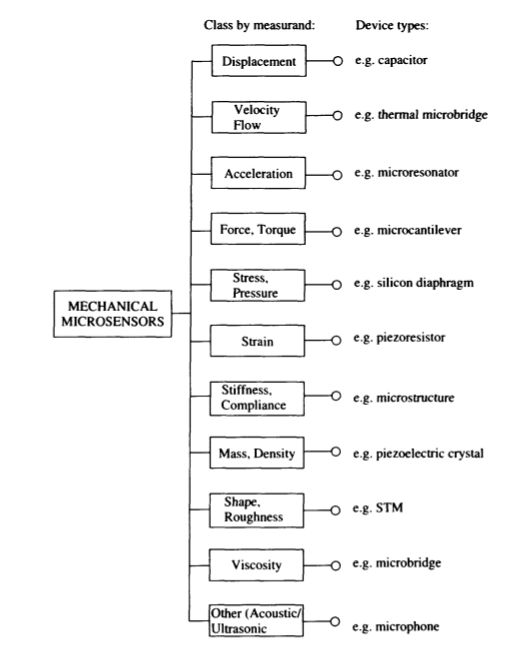
Figure 8.19 Classification scheme for mechanical microsensors. From Gardner (1994)
The most important classes of mechanical microsensors to date is a subset of only six or so and these constitute the majority of the existing market for micromechanical sensors. Thus, the main measurands of mechanical microsensors are as follows in alphabetical order:
• Acceleration/deceleration
• Displacement
• Flow rate
• Force/torque
• Position/angle
• Pressure/stress
Therefore, we describe in detail here four of the most important types of mechanical microsensors, namely,
• Pressure microsensors (Section 8.4.5)
• Microaccelerometers (Section 8.4.6)
• Microgyroscopes (Section 8.4.7)
• Flow microsensors (Section 8.4.8)
在這杜鵑呼嘯即將過境,或仍可借著今日『中秋佳月』之明,略窺 MEMS 之面貌的耶!!

 的觀點來看,所有的『有理數』
的觀點來看,所有的『有理數』  ,如果不是『有限小數』,就一定是『循環小數』。這是因為
,如果不是『有限小數』,就一定是『循環小數』。這是因為  的餘數只能是
的餘數只能是  ,既然說這個『除法』不是『有限的 』步驟,也就是說其間不能夠『整除』 ── 餘數為零 ──,那麼不超過
,既然說這個『除法』不是『有限的 』步驟,也就是說其間不能夠『整除』 ── 餘數為零 ──,那麼不超過  乘上
乘上  就可以得到
就可以得到  ,然而
,然而  已是『整數』,故可以不必考慮。假設
已是『整數』,故可以不必考慮。假設  是那個『循環小數』 的部分,那麼
是那個『循環小數』 的部分,那麼  ,因此
,因此  ,於是
,於是  。所以從
。所以從  ,可以得到
,可以得到  這個『有理數』的啊!!
這個『有理數』的啊!! 的『量測觀點』來講
的『量測觀點』來講  ,此處的
,此處的  是『測量』可能引發的『誤差值』。假使
是『測量』可能引發的『誤差值』。假使  ,此處
,此處  是一個『很大』的整數,那麼它的『最小誤差』也得是
是一個『很大』的整數,那麼它的『最小誤差』也得是  ,這是因為『整數』
,這是因為『整數』  的『離散性』不得不導致的結論,
的『離散性』不得不導致的結論,  。
。 是一個
是一個  次『多項式』之根的『代數數』,那麼存在一個『實數』
次『多項式』之根的『代數數』,那麼存在一個『實數』  ,對於所有的『有理數』
,對於所有的『有理數』  都有
都有  。
。 的『距離』也許可以說『更遠』或者講『更近』
的『距離』也許可以說『更遠』或者講『更近』  。然而假使
。然而假使  的話,
的話, ,其實這也就是『無窮小』和『無限大』要如何議論『等級』的『問題』的啊!這樣說的話,當『實數』
,其實這也就是『無窮小』和『無限大』要如何議論『等級』的『問題』的啊!這樣說的話,當『實數』  去掉了『有理數』
去掉了『有理數』  ,這個
,這個  的集合怎又可能是『可數的』呢?就算是『不可數』也怕會是『坑坑洞洞』的吧!!因此講那個『處處連續』、『無處可微分』以及『咫尺即天涯』之用實數『極限』的『科赫雪花』,恐怕是講著『分析』或也許說『解析』的『複雜』與『困難』代表的了!終將人們帶進了『撲朔迷離』的境遇的吧!就像是為甚麽又會有『邏輯必然』,但卻是『理解困難』的事情呢??
的集合怎又可能是『可數的』呢?就算是『不可數』也怕會是『坑坑洞洞』的吧!!因此講那個『處處連續』、『無處可微分』以及『咫尺即天涯』之用實數『極限』的『科赫雪花』,恐怕是講著『分析』或也許說『解析』的『複雜』與『困難』代表的了!終將人們帶進了『撲朔迷離』的境遇的吧!就像是為甚麽又會有『邏輯必然』,但卻是『理解困難』的事情呢??

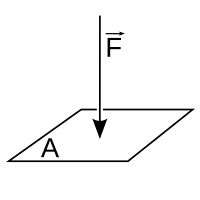

 is the pressure,
is the pressure, is the
is the  is the area of the surface on contact.
is the area of the surface on contact.
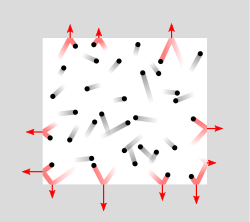
 ,即有『動量變化』就是發生『作用力』的另一種描述。然而一般那個
,即有『動量變化』就是發生『作用力』的另一種描述。然而一般那個 ;
; 為理想氣體的
為理想氣體的 為氣體
為氣體 為理想氣體的熱力學
為理想氣體的熱力學 為
為
 ) and stored in a lookup table. The precise relationship depends on the relevant piezoresistive coefficient
) and stored in a lookup table. The precise relationship depends on the relevant piezoresistive coefficient  of the diaphragm material.
of the diaphragm material. (8.32)
(8.32) and hence the applied pressure (
and hence the applied pressure (  (8.33)
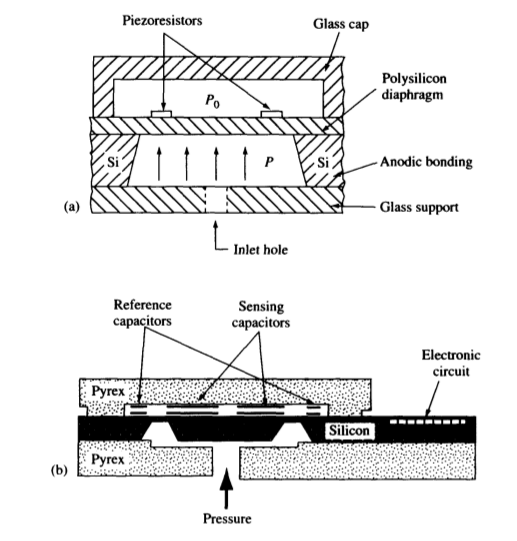
(8.33) , it is possible to fabricate the following basic types of pressure sensors:
, it is possible to fabricate the following basic types of pressure sensors: )
) )
)![sudo python3 Python 3.2.3 (default, Mar 1 2013, 11:53:50) [GCC 4.6.3] on linux2 Type "help", "copyright", "credits" or "license" for more information. >>> import time >>> from sense_hat import SenseHat >>> 感測 = SenseHat() >>> while True: ... 壓力 = 感測.get_pressure() ... print("Pressure: %s Millibars" % 壓力) ... time.sleep(3) ... Pressure: 1012.38818359375 Millibars Pressure: 1012.410888671875 Millibars Pressure: 1012.41455078125 Millibars Pressure: 1012.3994140625 Millibars Pressure: 1012.368896484375 Millibars Pressure: 1012.39794921875 Millibars Pressure: 1012.411376953125 Millibars Pressure: 1012.389892578125 Millibars Pressure: 1012.4013671875 Millibars Pressure: 1012.399169921875 Millibars Pressure: 1012.37890625 Millibars Pressure: 1012.362060546875 Millibars Pressure: 1012.38330078125 Millibars Pressure: 1012.347412109375 Millibars Pressure: 1012.417724609375 Millibars Pressure: 1012.35693359375 Millibars Pressure: 1012.396484375 Millibars ^CTraceback (most recent call last): File "<stdin>", line 4, in <module> KeyboardInterrupt >>> </pre> <span style="color: #808080;"><strong>【施加搖晃振動】</strong></span> <pre class="lang:sh decode:true">pi@raspberrypi ~](https://www.freesandal.org/wp-content/ql-cache/quicklatex.com-f4e6b11bf4c635687c1d91d171f33c2a_l3.png "Rendered by QuickLaTeX.com") sudo python3
Python 3.2.3 (default, Mar 1 2013, 11:53:50)
[GCC 4.6.3] on linux2
Type "help", "copyright", "credits" or "license" for more information.
>>> import time
>>> from sense_hat import SenseHat
>>> 感測 = SenseHat()
>>> while True:
... 壓力 = 感測.get_pressure()
... print("Pressure: %s Millibars" % 壓力)
... time.sleep(3)
...
Pressure: 1012.3779296875 Millibars
Pressure: 1012.384765625 Millibars
Pressure: 1012.3642578125 Millibars
Pressure: 1012.353515625 Millibars
Pressure: 1012.378173828125 Millibars
Pressure: 1012.34765625 Millibars
Pressure: 1012.355224609375 Millibars
Pressure: 1012.345703125 Millibars
Pressure: 1012.364501953125 Millibars
Pressure: 1012.3623046875 Millibars
Pressure: 1012.36083984375 Millibars
Pressure: 1012.396484375 Millibars
Pressure: 1012.35693359375 Millibars
Pressure: 1012.397216796875 Millibars
Pressure: 1012.357177734375 Millibars
Pressure: 1012.398681640625 Millibars
Pressure: 1012.39697265625 Millibars
Pressure: 1012.390380859375 Millibars
Pressure: 1012.403564453125 Millibars
Pressure: 1012.377685546875 Millibars
Pressure: 1012.358154296875 Millibars
^CTraceback (most recent call last):
File "<stdin>", line 4, in <module>
KeyboardInterrupt
>>>
sudo python3
Python 3.2.3 (default, Mar 1 2013, 11:53:50)
[GCC 4.6.3] on linux2
Type "help", "copyright", "credits" or "license" for more information.
>>> import time
>>> from sense_hat import SenseHat
>>> 感測 = SenseHat()
>>> while True:
... 壓力 = 感測.get_pressure()
... print("Pressure: %s Millibars" % 壓力)
... time.sleep(3)
...
Pressure: 1012.3779296875 Millibars
Pressure: 1012.384765625 Millibars
Pressure: 1012.3642578125 Millibars
Pressure: 1012.353515625 Millibars
Pressure: 1012.378173828125 Millibars
Pressure: 1012.34765625 Millibars
Pressure: 1012.355224609375 Millibars
Pressure: 1012.345703125 Millibars
Pressure: 1012.364501953125 Millibars
Pressure: 1012.3623046875 Millibars
Pressure: 1012.36083984375 Millibars
Pressure: 1012.396484375 Millibars
Pressure: 1012.35693359375 Millibars
Pressure: 1012.397216796875 Millibars
Pressure: 1012.357177734375 Millibars
Pressure: 1012.398681640625 Millibars
Pressure: 1012.39697265625 Millibars
Pressure: 1012.390380859375 Millibars
Pressure: 1012.403564453125 Millibars
Pressure: 1012.377685546875 Millibars
Pressure: 1012.358154296875 Millibars
^CTraceback (most recent call last):
File "<stdin>", line 4, in <module>
KeyboardInterrupt
>>>


 個氣體分子之『運動』的呢!事實上,想深入了解『三體互動』恐怕都需要借助『計算機』的哩!!那麼『自然律』果真能與『理化計算』等同的嗎???
個氣體分子之『運動』的呢!事實上,想深入了解『三體互動』恐怕都需要借助『計算機』的哩!!那麼『自然律』果真能與『理化計算』等同的嗎??? 很『靈敏』 sensitive ,是講當系統的『輸入』
很『靈敏』 sensitive ,是講當系統的『輸入』  有一點『變化』
有一點『變化』  ,系統之『輸出』
,系統之『輸出』  ,產生很大的『改變』
,產生很大的『改變』  ,也就是說
,也就是說 的『比值』很大。
的『比值』很大。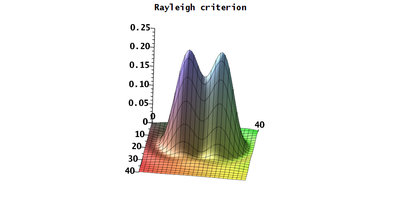

 ,透鏡的觀察者便無法分辨出有兩個物件。
,透鏡的觀察者便無法分辨出有兩個物件。 是一個『物理系統』,待量測『自然萬象』
是一個『物理系統』,待量測『自然萬象』  也是一個『物理系統』,彼此『交互作用』 ──
也是一個『物理系統』,彼此『交互作用』 ── 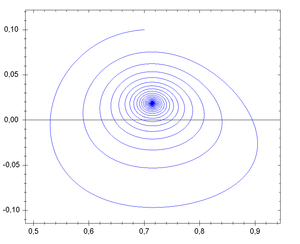
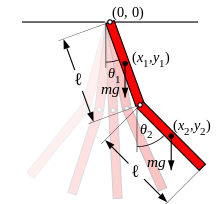
 物體,初始位置在
物體,初始位置在  ,初始速度為
,初始速度為  ,在
,在 
 的形式,比方說簡諧運動之線性彈力
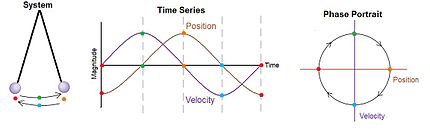
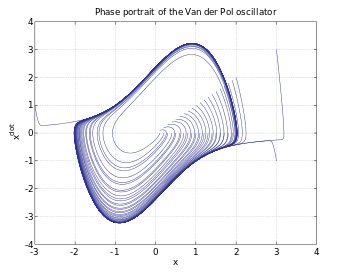
的形式,比方說簡諧運動之線性彈力  ,微分方程式很難有『確解』,大概都得用『數值分析』的方式求解。那麼有沒有另一種運動描述辦法的呢?龐加萊和玻爾茲曼 Boltzmann 等人發展了『相空間』phase space 的想法,因為物體一旦給定了初始位置與初始速度── 一般使用動量
,微分方程式很難有『確解』,大概都得用『數值分析』的方式求解。那麼有沒有另一種運動描述辦法的呢?龐加萊和玻爾茲曼 Boltzmann 等人發展了『相空間』phase space 的想法,因為物體一旦給定了初始位置與初始速度── 一般使用動量  ──,它的運動軌跡就由牛頓的第二運動定律所確定,相空間是一個 (位置,動量) 所構成的座標系,這樣該物體的運動軌跡就畫出了相空間裡的一條線 ── 叫做相圖 phase diagram ──。一般這條曲線不會『自相交』,因為相交代表有不同的運動軌跡可以選擇,所以一旦相交會就只能是一種『週期運動』。龐加萊在研究三體問題的相圖時,卻發現只要『初始點』── 位置或動量 ──,極微小的變化,相圖就發生很大的改變,這種『敏感性』可能導致系統的『不可預測性』或是『不穩定性』。
──,它的運動軌跡就由牛頓的第二運動定律所確定,相空間是一個 (位置,動量) 所構成的座標系,這樣該物體的運動軌跡就畫出了相空間裡的一條線 ── 叫做相圖 phase diagram ──。一般這條曲線不會『自相交』,因為相交代表有不同的運動軌跡可以選擇,所以一旦相交會就只能是一種『週期運動』。龐加萊在研究三體問題的相圖時,卻發現只要『初始點』── 位置或動量 ──,極微小的變化,相圖就發生很大的改變,這種『敏感性』可能導致系統的『不可預測性』或是『不穩定性』。