既已渡河,若是缺少地圖,怕會走許多冤枉路。在此略作整理 GrovePi 的官方文件,以為嚮導︰
【程式篇】
【派生 API 界面篇】
Python Library Documentation
The python library (Available at github) for grove pi has three types of functions:
………
【韌體 I2C 通訊篇】
GrovePi Protocol and Adding Custom Sensors
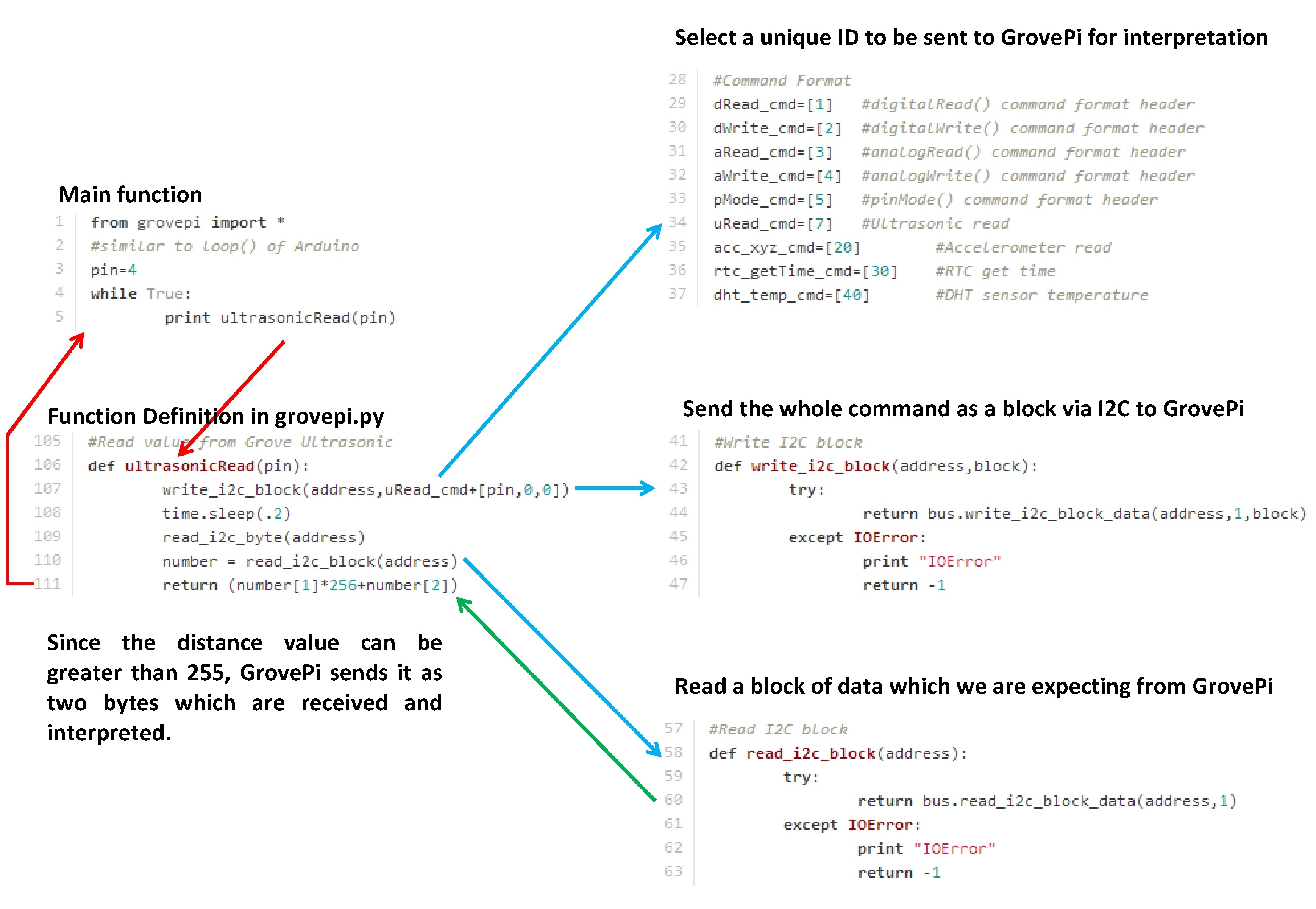
If you look at the above code, the function ultrasonicRead(pin), is repeatedly called to print the distance measured by the ranger.
The ultrasonicRead() is defined in GrovePi.py and is called every time. The Raspberry Pi sends the command to the GrovePi, waits for some time and requests the data back.
In the main python library, the RaspberryPi writes a block of data to the GrovePi whose address is 0x04 and the block which is sent has the following format(5 bytes).

For a new sensor, you can create a new unique id and send the required data to the Grove Pi.
In the main loop of the GrovePi, there is a case for each of the unique id. When a unique id is received the relevant code is executed and the data is stores in the b[] buffer(b[0] is dummy and should not be used). The Raspberry Pi then asks for the data to be returned back and the Grove Pi sends the bytes depending on the last command executed.
The processing and interpretation of the data is performed by the Python code on the Raspberry Pi and the output is returned back to the calling function.
………
初步瀏覽比對,發現『 GrovePi.py 』當是『 grovepi.py』。若思『範例』能講的清楚明白,或應補足
『 GrovePi/Software/Python/grovepi.py 』
程式主架構說明︰
# grovepi 主架構
# 命令碼
67 # Command Format
68 # digitalRead() command format header
69 dRead_cmd = [1]
70 # digitalWrite() command format header
71 dWrite_cmd = [2]
72 # analogRead() command format header
73 aRead_cmd = [3]
74 # analogWrite() command format header
75 aWrite_cmd = [4]
76 # pinMode() command format header
77 pMode_cmd = [5]
78 # Ultrasonic read
79 uRead_cmd = [7]
# 與 Arduino 韌體 I2C 讀寫通訊
162 # Write I2C block
163 def write_i2c_block(address, block):
164 try:
165 return bus.write_i2c_block_data(address, 1, block)
166 except IOError:
167 if debug:
168 print ("IOError")
169 return -1
170
171 # Read I2C byte
172 def read_i2c_byte(address):
173 try:
174 return bus.read_byte(address)
175 except IOError:
176 if debug:
177 print ("IOError")
178 return -1
179
180
181 # Read I2C block
182 def read_i2c_block(address):
183 try:
184 return bus.read_i2c_block_data(address, 1)
185 except IOError:
186 if debug:
187 print ("IOError")
188 return -1
# 派生 API 界面
243 # Read value from Grove Ultrasonic
244 def ultrasonicRead(pin):
245 write_i2c_block(address, uRead_cmd + [pin, unused, unused])
246 time.sleep(.2)
247 read_i2c_byte(address)
248 number = read_i2c_block(address)
249 return (number[1] * 256 + number[2])
欲創寫新裝置驅動者,務須知『韌體端』之對應面︰
# GrovePi V1.2.5 韌體
125 //Ultrasonic Read
126 else if(cmd[0]==7)
127 {
128 pin=cmd[1];
129 pinMode(pin, OUTPUT);
130 digitalWrite(pin, LOW);
131 delayMicroseconds(2);
132 digitalWrite(pin, HIGH);
133 delayMicroseconds(5);
134 digitalWrite(pin,LOW);
135 pinMode(pin,INPUT);
136 dur = pulseIn(pin,HIGH);
137 RangeCm = dur/29/2;
138 b[1]=RangeCm/256;
139 b[2]=RangeCm%256;
140 //Serial.println(b[1]);
141 //Serial.println(b[2]);
142 }