W!o+ 認為一個『實驗』的『結束』,也只是『探索』之『開始』。或許舊的疑惑未解!新的疑惑又生!!因此『分析』結果,『整理 』資料 ,『思辨』要點,『綜合』通盤 …… ,『準備』下次『實驗 』計畫 ,正是『科學求知』的方法。………
固然總有『不知』的時候?總有『不能』的情況??此時恰好困知勉行乎!也許終有『知之』的一天吧!?
之前的實驗結果,一起頭就叫人訝異︰
# 關閉電源,重新開機。確定 Arduino 在 Hard Reset 狀態。 pi@raspberrypi ~/example $ python Python 2.7.9 (default, Mar 8 2015, 00:52:26) [GCC 4.9.2] on linux2 Type "help", "copyright", "credits" or "license" for more information. >>> import grovepi >>> addr = 0x05 # 韌體 Wire 程式庫,如何處理『未下指令』之 I2C 『讀取』 # 位元組讀取 >>> grovepi.read_i2c_byte(addr) 0 # 區塊讀取 >>> grovepi.read_i2c_block(addr) [11, 0, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255] # 長度 32 ? >>> len(grovepi.read_i2c_block(addr)) 32 # Grove – Rotary Angle Sensor 測試。命令 3 >>> potentiometer = 0 # 設定 pinMode 為輸入。命令 5 >>> grovepi.pinMode(potentiometer,"INPUT") 1 # 讀取值 >>> sensor_value = grovepi.analogRead(potentiometer) 0 [11, 2, 191, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255] # 傳回值 >>> sensor_value 703 ………
。就讓我們從此處展開探索之旅耶!!
先匯總『問題』如下︰
‧ 為什麼『未下指令』,還能無誤讀取?
‧ 為什麼『位元組讀取』,傳回值為 0 ?
‧ 為什麼『區塊讀取』,傳回長度是 32 ?
‧ 為什麼『Grove – Rotary Angle Sensor』測試,序列埠沒有輸出?
‧………
經過多次查詢以及閱讀,『整理』與之相關資料如下︰
☆【 ATmega CPU DataSheet 】
ATmega48A/PA/88A/PA/168A/PA/328/P
第二零六頁
22. 2-wire Serial Interface
22.1 Features
‧ Simple Yet Powerful and Flexible Communication Interface, only ‧ ‧ ‧ ‧ two Bus Lines Needed
‧ Both Master and Slave Operation Supported
‧ Device can Operate as Transmitter or Receiver
‧ 7-bit Address Space Allows up to 128 Different Slave Addresses
‧ Multi-master Arbitration Support
‧ Up to 400kHz Data Transfer Speed
‧ Slew-rate Limited Output Drivers
‧ Noise Suppression Circuitry Rejects Spikes on Bus Lines
‧ Fully Programmable Slave Address with General Call Support
‧ Address Recognition Causes Wake-up When AVR is in Sleep Mode
‧ Compatible with Philips’ I2C protocol
……
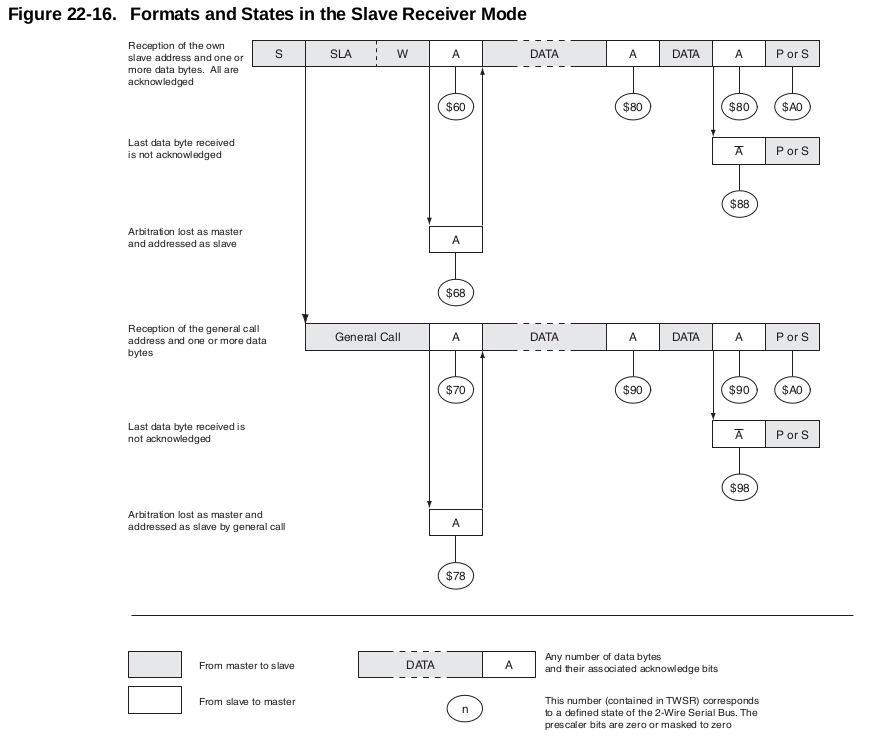
從屬接收模式
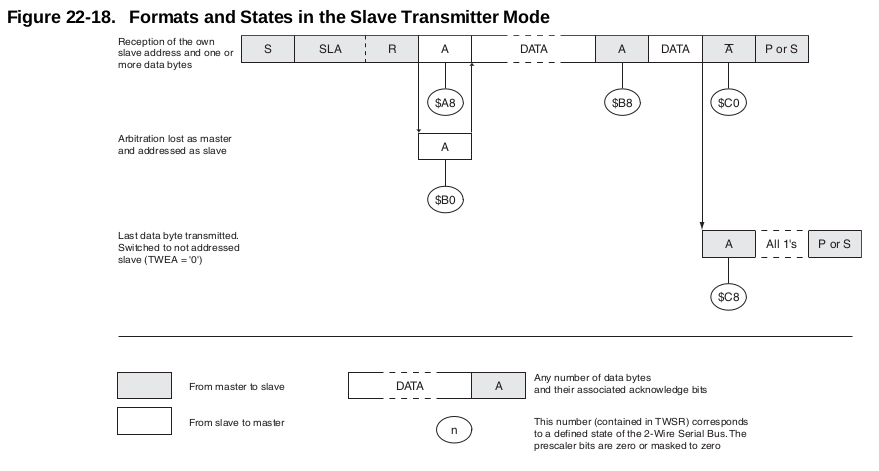
從屬傳送模式
☆ pi@raspberrypi /usr/share/arduino/libraries/Wire/utility $ ls
twi.c twi.h
pi@raspberrypi /usr/share/arduino/libraries/Wire/utility $ pwd
/usr/share/arduino/libraries/Wire/utility
/*
twi.c - TWI/I2C library for Wiring & Arduino
Copyright (c) 2006 Nicholas Zambetti. All right reserved.
This library is free software; you can redistribute it and/or
modify it under the terms of the GNU Lesser General Public
License as published by the Free Software Foundation; either
version 2.1 of the License, or (at your option) any later version.
This library is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public
License along with this library; if not, write to the Free Software
Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
Modified 2012 by Todd Krein (todd@krein.org) to implement repeated starts
*/
// Slave Receiver
case TW_SR_SLA_ACK: // addressed, returned ack
case TW_SR_GCALL_ACK: // addressed generally, returned ack
case TW_SR_ARB_LOST_SLA_ACK: // lost arbitration, returned ack
case TW_SR_ARB_LOST_GCALL_ACK: // lost arbitration, returned ack
// enter slave receiver mode
twi_state = TWI_SRX;
// indicate that rx buffer can be overwritten and ack
twi_rxBufferIndex = 0;
twi_reply(1);
break;
case TW_SR_DATA_ACK: // data received, returned ack
case TW_SR_GCALL_DATA_ACK: // data received generally, returned ack
// if there is still room in the rx buffer
if(twi_rxBufferIndex < TWI_BUFFER_LENGTH){
// put byte in buffer and ack
twi_rxBuffer[twi_rxBufferIndex++] = TWDR;
twi_reply(1);
}else{
// otherwise nack
twi_reply(0);
}
break;
case TW_SR_STOP: // stop or repeated start condition received
// put a null char after data if there's room
if(twi_rxBufferIndex < TWI_BUFFER_LENGTH){
twi_rxBuffer[twi_rxBufferIndex] = '\0';
}
// sends ack and stops interface for clock stretching
twi_stop();
# 重點
// callback to user defined callback
twi_onSlaveReceive(twi_rxBuffer, twi_rxBufferIndex);
// since we submit rx buffer to "wire" library, we can reset it
twi_rxBufferIndex = 0;
// ack future responses and leave slave receiver state
twi_releaseBus();
break;
case TW_SR_DATA_NACK: // data received, returned nack
case TW_SR_GCALL_DATA_NACK: // data received generally, returned nack
// nack back at master
twi_reply(0);
break;
// Slave Transmitter
case TW_ST_SLA_ACK: // addressed, returned ack
case TW_ST_ARB_LOST_SLA_ACK: // arbitration lost, returned ack
// enter slave transmitter mode
twi_state = TWI_STX;
// ready the tx buffer index for iteration
twi_txBufferIndex = 0;
// set tx buffer length to be zero, to verify if user changes it
twi_txBufferLength = 0;
// request for txBuffer to be filled and length to be set
# 重點
// note: user must call twi_transmit(bytes, length) to do this
twi_onSlaveTransmit();
# 要點
// if they didn't change buffer & length, initialize it
if(0 == twi_txBufferLength){
twi_txBufferLength = 1;
twi_txBuffer[0] = 0x00;
}
// transmit first byte from buffer, fall
case TW_ST_DATA_ACK: // byte sent, ack returned
// copy data to output register
TWDR = twi_txBuffer[twi_txBufferIndex++];
// if there is more to send, ack, otherwise nack
if(twi_txBufferIndex < twi_txBufferLength){
twi_reply(1);
}else{
twi_reply(0);
}
break;
/*
* Function twi_attachSlaveRxEvent
* Desc sets function called before a slave read operation
* Input function: callback function to use
* Output none
*/
void twi_attachSlaveRxEvent( void (*function)(uint8_t*, int) )
{
twi_onSlaveReceive = function;
}
/*
* Function twi_attachSlaveTxEvent
* Desc sets function called before a slave write operation
* Input function: callback function to use
* Output none
*/
void twi_attachSlaveTxEvent( void (*function)(void) )
{
twi_onSlaveTransmit = function;
}
☆ 【 Arduino Wire 程式庫】深度闡釋
:: Wire Library, Explored
An indepth reference to the Arduino Wire library.
☆ 『 Linux/Documentation/i2c/smbus-protocol 』
I2C Block Transactions
======================
The following I2C block transactions are supported by the SMBus layer and are described here for completeness. They are *NOT* defined by the SMBus specification.
I2C block transactions do not limit the number of bytes transferred but the SMBus layer places a limit of 32 bytes.
I2C Block Read: i2c_smbus_read_i2c_block_data()
================================================
This command reads a block of bytes from a device, from a designated register that is specified through the Comm byte.
S Addr Wr [A] Comm [A]
S Addr Rd [A] [Data] A [Data] A … A [Data] NA P
Functionality flag: I2C_FUNC_SMBUS_READ_I2C_BLOCK
I2C Block Write: i2c_smbus_write_i2c_block_data()
==================================================
The opposite of the Block Read command, this writes bytes to a device, to a designated register that is specified through the Comm byte. Note that command lengths of 0, 2, or more bytes are supported as they are indistinguishable from data.
S Addr Wr [A] Comm [A] Data [A] Data [A] … [A] Data [A] P
Functionality flag: I2C_FUNC_SMBUS_WRITE_I2C_BLOCK
☆ 『 i2c-tools_3.1.0.orig.tar.bz2 』
/*
* smbusmodule.c - Python bindings for Linux SMBus access through i2c-dev
* Copyright (C) 2005-2007 Mark M. Hoffman <mhoffman@lightlink.com>
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; version 2 of the License.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program; if not, write to the Free Software
* Foundation, Inc., 59 Temple Place - Suite 330, Boston, MA 02111-1307, USA.
*/
PyDoc_STRVAR(SMBus_read_i2c_block_data_doc,
"read_i2c_block_data(addr, cmd, len=32) -> results\n\n"
"Perform I2C Block Read transaction.\n");
static PyObject *
SMBus_read_i2c_block_data(SMBus *self, PyObject *args)
{
# 要點
int addr, cmd, len=32;
union i2c_smbus_data data;
if (!PyArg_ParseTuple(args, "ii|i:read_i2c_block_data", &addr, &cmd,
&len))
return NULL;
SMBus_SET_ADDR(self, addr);
data.block[0] = len;
/* save a bit of code by calling the access function directly */
if (i2c_smbus_access(self->fd, I2C_SMBUS_READ, (__u8)cmd,
len == 32 ? I2C_SMBUS_I2C_BLOCK_BROKEN:
I2C_SMBUS_I2C_BLOCK_DATA, &data)) {
PyErr_SetFromErrno(PyExc_IOError);
return NULL;
}
/* first byte of the block contains (remaining) data length */
return SMBus_buf_to_list(&data.block[1], data.block[0]);
}
PyDoc_STRVAR(SMBus_write_i2c_block_data_doc,
"write_i2c_block_data(addr, cmd, [vals])\n\n"
"Perform I2C Block Write transaction.\n");
static PyObject *
SMBus_write_i2c_block_data(SMBus *self, PyObject *args)
{
int addr, cmd;
union i2c_smbus_data data;
if (!PyArg_ParseTuple(args, "iiO&:write_i2c_block_data", &addr, &cmd,
SMBus_list_to_data, &data))
return NULL;
SMBus_SET_ADDR(self, addr);
/* save a bit of code by calling the access function directly */
if (i2c_smbus_access(self->fd, I2C_SMBUS_WRITE, (__u8)cmd,
I2C_SMBUS_I2C_BLOCK_BROKEN, &data)) {
PyErr_SetFromErrno(PyExc_IOError);
return NULL;
}
Py_INCREF(Py_None);
return Py_None;
}
同時也參考他人之討論︰
☆ 『 [I2C] onRequest and onReceive as slave with Raspberry Pi Master 』
I discovered a big Problem for my Project today. I try to connect a few Arduinos to a Raspberry Pi with I2C. I have a onRequest and a onReceive function (code below). On my Raspberry Pi I use smbus with python.My onReceive function works fine and well, every “bus.write[…]” function calls my onReceive function as it should.
But not onRequest. Only when i call “read_byte(addr)” in my python script, the Arduino will call the onRequest function. But it is necessary that I can use at least “byte read_byte_data(addr,cmd)” or “long[] read_block_data(addr,cmd)”. These functions call the onReceive Method, whyever.So I thought “no Problem”, just use onReceive like onRequest and write data there. But then the BUS is corrupted and the Python on Raspberry Pi gets an I/O Error.I just recognized that with the command “print bus.read_i2c_block_data(0x04, 0x01)” it prints nearly the right output (take a look in my log below), but on my Arduino Serial connection the “dataRequest() called with command” is not printed. I just don’t understand o_OI don’t know what I’m doing wrong o_O. Can someone explain this?Best regards
brainvoid
───
請判斷,這是否足以『回答』上述『問題』?能夠『準備』新實驗『計劃』的呢??