我們已經看過了『薄透鏡』之推導。若問為什麼『幾何光學』特別要強調它的呢?恐想介紹重要之『光學概念』的耶?也怕人們迷失於『複雜計算』的乎!即使僅以『造透鏡者公式』而言︰
![\frac{1}{f} = (n-1) \left[ \frac{1}{R_1} - \frac{1}{R_2} \right]](http://www.freesandal.org/wp-content/ql-cache/quicklatex.com-4b0ce6c5ab9f233a4ce4755e9e287e50_l3.png "Rendered by QuickLaTeX.com") ,
,
對比著『造透鏡者方程式』
Lensmaker’s equation
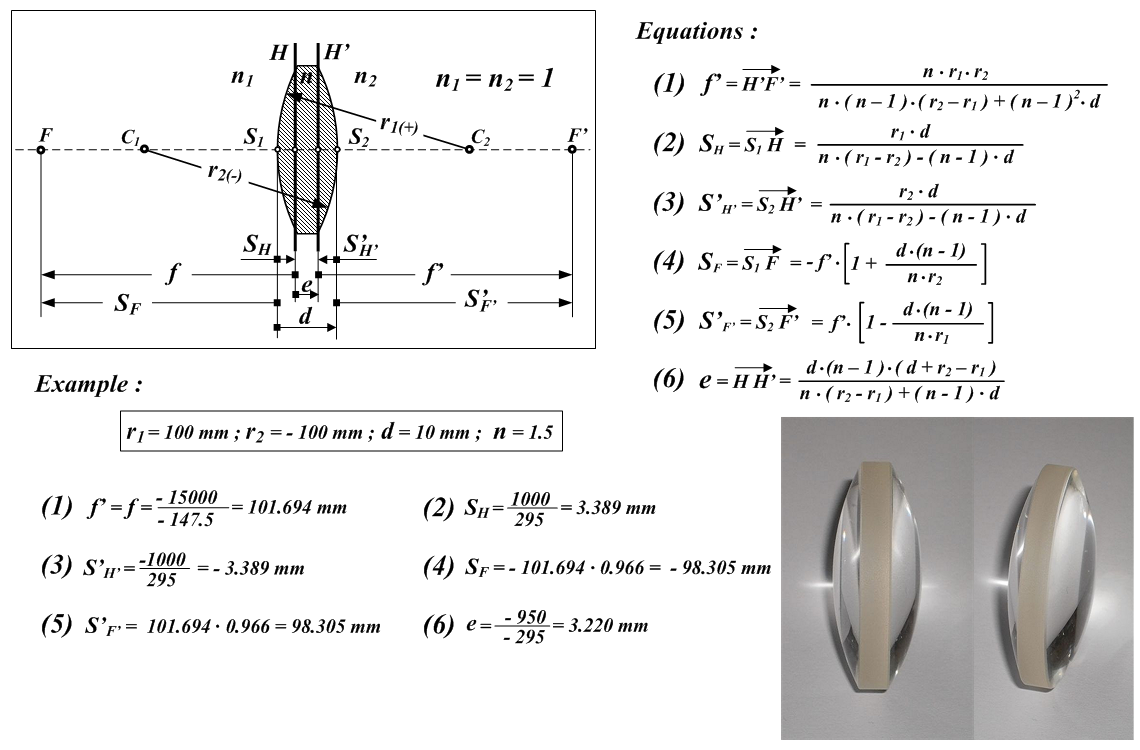
The focal length of a lens in air can be calculated from the lensmaker’s equation:[20]
![{\frac {1}{f}}=(n-1)\left[{\frac {1}{R_{1}}}-{\frac {1}{R_{2}}}+{\frac {(n-1)d}{nR_{1}R_{2}}}\right],](https://wikimedia.org/api/rest_v1/media/math/render/svg/26fb54977c7f965da063dcaded08258c3377f1d9)
where
-
is the refractive index of the lens material,
-
is the radius of curvature (with sign, see below) of the lens surface closest to the light source,
-
is the radius of curvature of the lens surface farthest from the light source, and
is the thickness of the lens (the distance along the lens axis between the two surface vertices).
The focal length f is positive for converging lenses, and negative for diverging lenses. The reciprocal of the focal length, 1/f, is the optical power of the lens. If the focal length is in metres, this gives the optical power in dioptres (inverse metres).
Lenses have the same focal length when light travels from the back to the front as when light goes from the front to the back. Other properties of the lens, such as the aberrations are not the same in both directions.
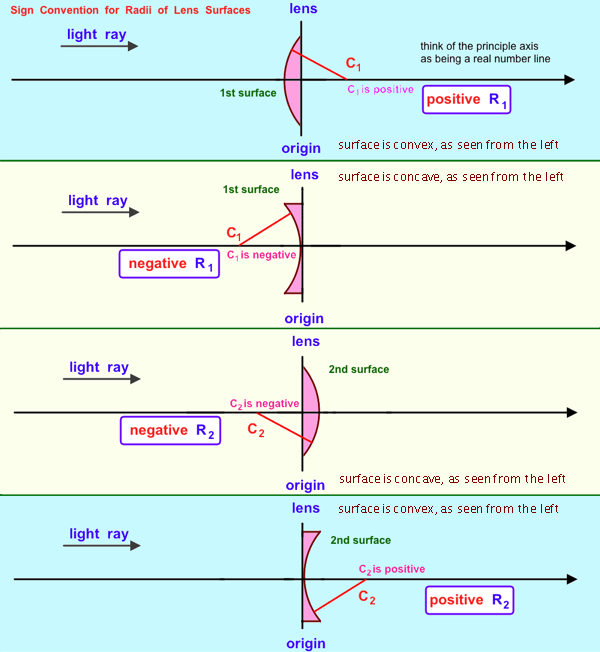
Sign convention for radii of curvature R1 and R2
The signs of the lens’ radii of curvature indicate whether the corresponding surfaces are convex or concave. The sign convention used to represent this varies, but in this article a positive R indicates a surface’s center of curvature is further along in the direction of the ray travel (right, in the accompanying diagrams), while negative R means that rays reaching the surface have already passed the center of curvature. Consequently, for external lens surfaces as diagrammed above, R1 > 0 and R2 < 0 indicate convex surfaces (used to converge light in a positive lens), while R1 < 0 and R2 > 0 indicate concave surfaces. The reciprocal of the radius of curvature is called the curvature. A flat surface has zero curvature, and its radius of curvature is infinity.
Thin lens approximation
If d is small compared to R1 and R2, then the thin lens approximation can be made. For a lens in air, f is then given by
![{\frac {1}{f}}\approx \left(n-1\right)\left[{\frac {1}{R_{1}}}-{\frac {1}{R_{2}}}\right].](https://wikimedia.org/api/rest_v1/media/math/render/svg/c633e7b574392e54107881cd2e697e0ba9a68877)
雖說『此式』  即可導出『那式』!!到底是打哪來的哩??或有人說這只是『厚透鏡』之『薄化』說法,不信可以驗之以︰
即可導出『那式』!!到底是打哪來的哩??或有人說這只是『厚透鏡』之『薄化』說法,不信可以驗之以︰
pi@raspberrypi:~n = \frac{n_2}{n_1}
-(n-1) \left( \frac{1}{R_1} - \frac{1}{R_2} + \frac{(n - 1) d}{n R_1 R_2} \right) $ 。
是理果能變之哉???