驢橋定理
驢橋定理(拉丁語:Pons asinorum),也稱為等腰三角形定理,是在歐幾里得幾何中的一個數學定理,是指等腰三角形二腰對應的二底角相等。等腰三角形定理也是歐幾里得的幾何原本第一卷命題五的內容。
有關其名稱驢橋定理的由來有二種:一種是幾何原本中的示意圖即為一座橋,另外一種比較廣為大家接受,是指這是幾何原本中第一個對於讀者智力的測試,並且做為往後續更困難命題的橋樑[1]。幾何學是列在中世紀的四術之中,驢橋定理是在幾何原本的前面出現的較困難命題,是數學能力的一個門檻,也稱之為「笨蛋的難關」[2],無法理解此一命題的人可能也無法處理後面更難的命題。
無論其名稱的由來為何,驢橋定理一詞也變成是一種隱喻,是指對能力或了解程度的關鍵測試,可以將了解及不了解的人區分開來[3]。
Pons asinorum
In geometry, the statement that the angles opposite the equal sides of an isosceles triangle are themselves equal is known as the pons asinorum (Latin pronunciation: [ˈpons asiˈnoːrʊm]; English /ˈpɒnz ˌæsᵻˈnɔərəm/ PONZ-ass-i-NOR-(r)əm), Latin for “bridge of donkeys”. This statement is Proposition 5 of Book 1 in Euclid‘s Elements, and is also known as the isosceles triangle theorem. Its converse is also true: if two angles of a triangle are equal, then the sides opposite them are also equal.
The name of this statement is also used metaphorically for a problem or challenge which will separate the sure of mind from the simple, the fleet thinker from the slow, the determined from the dallier; to represent a critical test of ability or understanding.[1]‘
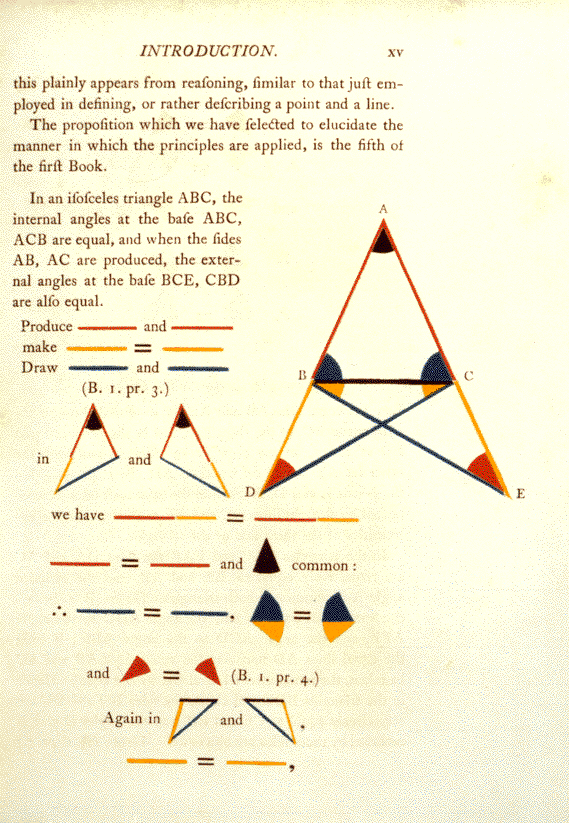
Byrne版幾何原本中,驢橋定理的內容,有列出部份歐幾里得的證明
假如兩個三角形全等之第一原理為 SAS ── 夾角相等、夾角之兩邊亦皆對等 ── ,那麼作等長之延伸線段,迭代使用 SAS 證明,的確需要一番思慮。若是 SSS ── 三邊長都對應相等 ── 當第一原理,或許只需在等腰三角形之底取中點,就可藉 SSS 得出兩底角相等。據知幾何原本裡根本沒有 SSS 全等,這又為什麼呢?難到是因為它不夠直覺嗎?還是以一邊為底,兩端點各依所餘兩邊作圓,此二圓將相交於兩點,那要如何判定所形成的這兩個三角形全等的呢??也許 SSS 之證明可以藉著在頂點處作條平行於底邊的平行線︰
『歐幾里得』的『平行公設』 ── 經過『線外』一『點』,只能作一條『平行線』平行該『線』 ──,或許正因為不夠『直覺』,然而又有人將它看成了『公理』,於是乎長期以來議論不斷,如此經過了兩千多年。一八二零年時,俄國數學家『尼古拉‧伊萬諾維奇‧羅巴切夫斯基』 Никола́й Ива́нович Лобаче́вский 想用『歸謬法』證明︰假使僅『反對』了『平行公設』 ── 假設有兩條平行線 ── ,但是卻『保留』著『其它公設』,這樣的『幾何系統』是不是會發生內部 之『邏輯矛盾』的呢?本來是想『證明』平行公設的『必要性』,結果意外『成立』了一門『新的幾何學』,這就是第一個被提出的『非歐幾何學』。如果從『羅氏幾何學』建構方法來看,我們可以『知道』只要『選擇』邏輯上不矛盾的『一些公理』都有可能『成立』一種『幾何學』。這樣我們的『大自然』它會『選擇』特定的『幾何學』的嗎?假使果真有這個『幾何學』,我們又要『依據』什麼才能『判斷』它是『真實』的呢??因此我們或許更當 細思『先驗知識』與『後驗知識』之間的大哉『辯』與『辨』的吧!!
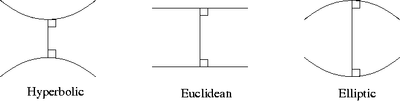
三種平行假設

笛沙格定理
如果A.a,B.b,C.c 共點,那麼 (A.B)∩(a.b),(A.C)∩(a.c),(B.C)∩(b.c) 共線。
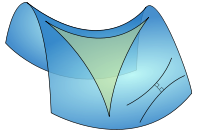
雙曲面幾何學
多條平行線
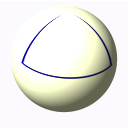
球面幾何學
沒有平行線
─── 摘自《【Sonic π】電聲學之電路學《四》之《 !!!! 》上》
在此頂點兩端都可取一點,依據 SAS 及內錯角相等,全等於 SSS 之三角形。如是再因平行線的唯一性而得證。傳聞愛因斯坦小時並不了了,嘗如倔驢般畫了幾百個直角三角形,只求能實證畢氏定理,豈非反倒助其後發先至的呢!!因是一時之會與不會從來不是問題 ,想不想會才是大哉問的哩??!!
雖然通常求解一般性問題︰ 的所有整數解。
的所有整數解。
勾股數組
勾股數組是滿足勾股定理 



任意一組勾股數 

趙爽 勾股圓方圖證明勾股定理法動畫
要比特定問題︰ 的整數解。
的整數解。
困難的多。事實上這並非是必然的矣!!??
就讓我們以一般光學矩陣為例

探討前後焦距、主平面、以及成像法則吧。如是也可知道 ABCD 這四個符號,實有著深刻的意蘊,故能決定那光學系統之行為。
【前後焦距】
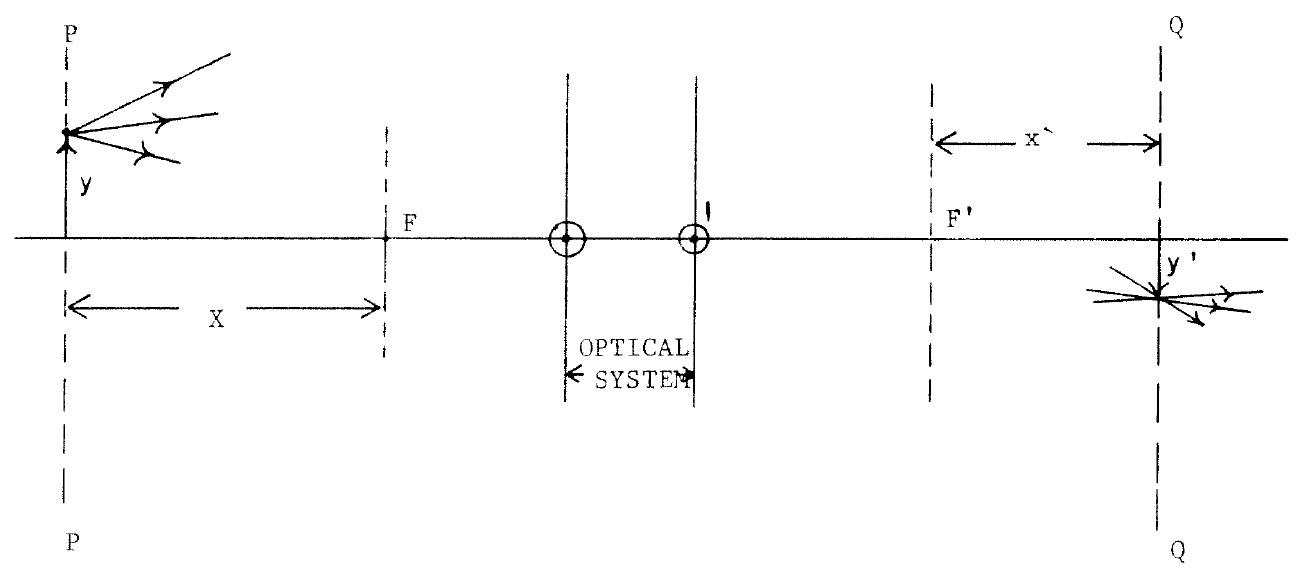
依慣例假設光的行徑方向是左→右,遇一光學系統,此處發生折射【※ 或反射】,這處稱之為『前端點』  ,而後行經此光學系統 ,最終發生折射處【※ 或反射】稱之為『後端點』
,而後行經此光學系統 ,最終發生折射處【※ 或反射】稱之為『後端點』  。這構成了『端點面參考系』,也就是『前後焦距』以平行光『度量』聚散的座標系。簡單推導如下︰
。這構成了『端點面參考系』,也就是『前後焦距』以平行光『度量』聚散的座標系。簡單推導如下︰
pi@raspberrypi:~-\frac{A}{C}
-\frac{D}{C}
\frac{1 - A}{C}
\frac{1 - D}{C}
det \left( \begin{array}{cc}
A & B \\
C & D \end{array} \right) = A D - B C = 1f_{eff}
= -\frac{A}{C} - \frac{1 - A}{C} = - \frac{1}{C}
f_{eff}
= -\frac{D}{C} - \frac{1 - D}{C} = - \frac{1}{C}
\frac{1}{do} + \frac{1}{di} = \frac{1}{f_{eff}}$
果能有疑義焉☆