不管一代『勝似』一代?一代『不及』一代??一代與一代之間的『對話』彷彿都是一樣!
人類即使反對『強權即公理』,卻又不能真探『歷史之事實』,

一九四九年,愛蓮娜‧羅斯福
與《世界人權宣言》

世界的第一夫 人
安娜‧愛蓮娜‧羅斯福 Anna Eleanor Roosevelt 是一位美國政治人物。她是第三十二任美國總統富蘭克林‧德拉諾‧羅斯福的妻子。從一九三三年三月直到一九四五年四月羅斯福做了四次總統任期,因此愛蓮娜‧羅斯福夫人也是美國史上任職時間最長的第一夫人。二次大戰後她出任美國首任駐聯合國大使,並且監督起草了聯合國的《世界人權宣言》。這位夫人同時也是一位女性主義者,一生大力提倡保護『人權』。後來美國的杜魯門總統在讚揚她的『人權成就』時 ,稱她為『世界的第一夫 人』 。
《世界人權宣言》是聯合國大會於一九四八年十二月十日在法國巴黎夏樂宮通過的一份目的在於維護『人類基本權利』的文獻 ── 聯合國大會第217 號決議,A/RES/217 ──。
據聞,宣言起草的直接原因是對第二次世界大戰的省思,這也是『第一份』在整個地球內表達『所有人類都該享有的基本權利』之文件。『世界人權宣言』共有三十條,完整文件可到聯合國自己的網站上閱讀。
一個甲子已經過去了,這個世界依然是不像個地球村,仍舊是不能里仁為美,甚至你爭我奪之勢越演越烈,這又是為什麼呢?或許聽一聽莊子是怎麽看待自然法則、人間道理以及是非議論的吧!認同也好,不認同也罷,宇宙中能發生的事情,本就未被避免,不能發生的現象,難到能夠被創造的嗎?說是『依法行政』,講要『原理而行』,所謂的『法理』,果真在自然社會中有『實據』的嗎??假使查無實據,又如何杜天下攸攸之口,而能不『大辯哉』的呢!曾經在『科幻電影』裡有『地球村啟始日,恰外星人進攻時』,
─── 引自《人類為何需要人權宣言?!》
即使打算『自立自強』,終究不能堅持『死而後已』,
一八九五年三 月二十三日── 1895年4月17日 ──,當日李鴻章與日本首相伊藤博文簽訂了《馬關條約》割讓臺灣。於是民情激憤 ,上書臺灣巡撫唐景崧,表明不願死於割拒,寧死於亂民;誓死不服倭,更不願死於倭寇之手,那時士紳丘逢甲力擁唐景崧建立臺灣民主國,出任總統,惜哉九日而亡!
民國五十年六月,于右任先生看著一張民國元年在上海照的老照片,上有孫中山、蔡元培、胡漢民等等昔日黨友,感慨之餘寫下【壬子元日】一九一二年
不信青春唤不回,
不容青史盡成灰。
低徊海上成功宴,
萬里江山酒一杯。
一談到『歷史』,一般人們想的是以古鑑今的教訓 ── 用鐵‧血換來的 ──,這固然重要,然而歷史遠遠廣博於此。為什麼呢?教育以其目的而言,只能總結重要的知識,然而什麼是重要的呢?所以一般會『掛一漏萬』,這也是無可奈何!其次,人們多半輕忽耳濡目染的『身教』,事實上這十分的重要;俗語說『聽君一席話 ,勝讀十年書』都尚且如此,更何況如能常相左右!!既使不能,藉著『人物傳記』的傳聞逸事也可如此的效法一番── 如果是他會如何? ──。
一代宗師史學家陳寅恪ㄎㄜˋ生於一八九零年七月三日,民初時期任清華大學國學院是四大導師之一,另三人是梁啟超、王國維 、趙元任,通曉二十餘種语言。一九一一年十月三日,由法國前往瑞士途中寄給友人的一張明信片上的『字謎』,引起網路上的一些討論︰
今 夕中秋(片到之時),有一問題于左:費列得力大王致福祿德爾書:Venez 岬6/100 p/d福祿德爾回答ga(此是諧聲)。是何意思?諸公皆深通德、法之事之人,如不能解除此字謎,罰脹肚酒一百杯。倜翁歸自法國,別號巴黎通,必深通法文, 尤宜猜中此字謎,但恐公等已知之爾?
作者不通法文無法置喙,彷彿有人論解此事,只覺兩個甲子過去了 ,一張明信片都成為某上海收藏家收藏的『古物』了。一九二八年暑假陳寅恪回到上海探親,與唐景崧之孫女唐篔ㄩㄣˊ結婚。此前三年,先生三十五歲,早已遊學西方多國學貫東西古今,卻没拿過一張文憑,又能應聘於清華國學研究院。所開之課,當時的名家如吳宓、朱自清、馮友蘭等都來旁聽,果真是教授的教授。胡適先生與之朋比交深,其父胡傳曾任臺東知州,種種因緣之故,於一九三一年九月寫《題唐景崧先生遺墨》一首詩贈給陳寅恪︰
南天民主國,回首一傷神。
黑虎今何在,黃龍亦已陳。
幾枝無用筆,半打有心人,
畢竟天難補,滔滔四十春。
─── 引自《一道怪題??》
也許因此作者不知該怎麼想或談『光復節』的吧?
大清帝國於甲午戰爭戰敗後,將臺灣、澎湖群島割讓予日本。1945年大日本帝國在第二次世界大戰戰敗投降,並向同盟國簽署《降伏文書》,表明履行《波茨坦公告》。臺灣總督兼第十方面軍司令官安藤利吉將軍於 1945 年 10 月 25 日依盟軍最高統帥麥克阿瑟發布的軍事命令《一般命令第一號》的第一條甲項規定,在臺北公會堂向臺灣地區受降主官陳儀投降並簽署受領文件[5],當時的中華民國官方宣布恢復對臺灣、澎湖列島之主權[4],否定光復論者則認為當時的中華民國只是代表同盟國軍事佔領臺灣[6][7]。1946年8月,臺灣省行政長官公署頒布命令,明訂 10 月 25 日為「臺灣光復節」以為紀念。[8][9]
《波茨坦公告》公告包含實施《開羅宣言》, 此戰爭時期中美英三國的共同宣言,宣示協同對日作戰的宗旨(It is their purpose,或翻譯成三國之「意向、用意、目的」,表達參與這場戰爭的目的,要剝奪日本在第一次世界後奪得佔領的太平洋島嶼及日本竊取自中國的領土, 並「應將」(shall be)東北四省、臺灣、澎湖歸還中華民國[10][11]。雖有先前承諾,但日本仍擁有臺灣主權一直到簽訂《舊金山和約》時(土地主權的轉移依國際法慣例須以「正式條約」做為依據,並解決一系列戰後的問題),日本載明「放棄」臺灣與澎湖,且未載明臺灣與澎湖主權的後續歸屬國家[12][13]。
───
或者說和講誰才是『釣魚台』主人的呢??所以就容易遺忘
龍的傳人
1978年12月,美國政府宣布與播遷台灣的中華民國政府斷絕外交關係,轉與實際管轄中國大陸的中華人民共和國政府建交。消息傳至臺灣,侯德健聽聞後,想到美國與中華民國斷交轉與大陸建交,就使一方高興一方難過,中國還是處在受外國擺布的日子裡。侯德健奮筆填此歌詞,後首先經台灣名歌手李建復演唱,而台灣報紙在官方授意下一再宣傳,令歌曲變得家傳戶曉。隨後經過香港歌手張明敏以及關正傑的分別演繹,更傳遍中國大陸,而「龍的傳人」也成為中華民族的別稱。
原著發表時為台灣戒嚴狀態,歌曲需送行政院新聞局審查。當時正逢中華民國與美國斷交,新聞局為避免刺激美方,故將侯德健原著歌詞中之「四面楚歌是洋人的劍」改成「四面楚歌是姑息的劍」。
侯德健曾表示,歌詞靈感背景是 1900 年的八國聯軍。
後續
由於侯德健在 1983 年違反《台灣省戒嚴令》前往中國大陸,《龍的傳人》一度遭行政院新聞局禁唱; 1987 年,台灣解嚴,禁令隨之取消。
《龍的傳人》奪得華視綜藝節目《綜藝100》〈創作歌謠排行榜〉第1週至第14週榜首。 1985年央視春晚,曾任美國加州喜瑞都市長的美籍華人黃錦波第一次將這首歌演唱到中國大陸。
1983年7月2日,臺灣歷史學家戴國煇於美國中西部夏令營的演講:
我認為〈龍的傳人〉的歌詞寫得不錯。但我始終不能瞭解一些黨外人士最近的言論,他們喜歡提出「一千八百萬的全體台灣人」云云的話。我認為他們的提法雖然比起台獨第一代等人士常把省籍矛盾無限擴大成民族矛盾那一類的言論有些進步,但我覺得一千八百萬人云云的提法既沒有「內容」、亦是含糊不清的。至於有強逼一些(中國)大陸籍人士或大陸籍人士的後裔認同「台灣人」為至上課題,這一種強姦民意的作法是少有效果的 ,它亦不該是我們追求民主自由、人權至上人士來肯定的行為。
最近黨外論壇內部,有意無意的一而再、再而三地提出「台灣意識」,或有意地強調「台灣人意識」的成長和成熟。我認為他們有一點焦急,有意迴避客觀現實、輕視歷史過程,而一心一意、一廂情願地把自己的「理念 」、主觀願望道出來;這個有一點像東條英機提倡大和魂、高揚日本精神的作法。……
〈龍的傳人〉為何能在台灣校園歌曲中保持它的長期地位,還不值得高唱「台灣人意識成長論」者探討的嗎?一千八百萬「台灣人」應該包含有多元的存在;我們只要不是裝糊塗、缺乏社會科學學養的話,我們是不作這一種提法的。不過我還是同情,那些正在玩「政治魔術 」的黨外民意代表們不得不做出那一種呼籲的處境;但是,這一種同情是屬於「情絲」一類的,不是一種社會科學的洞察。[1]
在1989年5月27日的香港《民主歌聲獻中華》演唱會上,侯德健把《龍的傳人》歌詞作了兩處修訂:把「四面楚歌是姑息的劍」改為「四面楚歌是獨裁的劍」,把「黑眼睛黑頭髮黃皮膚,永永遠遠是龍的傳人」改為「不管你自己願不願意,永永遠遠是龍的傳人」。
2000年,歌手王力宏在其專輯《永遠的第一天》中,翻唱了其重新編曲後的《龍的傳人》,成為年輕人所唱的版本。2000年11月,糯米糰專輯《青春鳥王》有一首歌曲名為《跆拳道》,由於其部分歌詞摘錄自《龍的傳人》,加上MV中蓄意戲仿當時翻唱該曲的王力宏 ,所以不少人皆認為這首歌有諷刺王力宏之嫌。(註:王力宏其實是李建復的表侄。)
2008年1月1日,中華民國副總統呂秀蓮出席南投縣國姓鄉禪機山仙佛寺舉辦的「中華民族祭祖大典」,認為會場內播放的《龍的傳人 》應該把「古老的東方有一條龍,它的名字就叫中國」這句歌詞的「中國」改成「中華」較好:「我覺得它改一個字啦,不要講『中國』,(而要)講『中華』。『中華』是可以接受。『中國』是政治意涵,『中國』是指中華人民共和國。」[2]
2008年12月15日,中視八點檔連續劇《光陰的故事》首播第21集,朱磊(寇家瑞飾)參加《六燈獎》的〈校園歌曲演唱〉單元,參賽歌曲為《龍的傳人》。
2009年,《龍的傳人》入選中宣部推薦100首愛國歌曲第62首。
2011年5月1日,滾石唱片30周年演唱會上,侯德健在北京鳥巢登台演唱《龍的傳人》,這也是他21年來首次在中國大陸公開演唱。全場共有90000名觀眾。消息稱,演出主辦方在最後一刻拿到中華人民共和國文化部的批文,允許侯德健上台演唱。
龍的傳人 – 李建復
曲︰侯德建
詞︰侯德建
遙遠的東方有一條江 它的名字就叫長江
遙遠的東方有一條河 它的名字就叫黃河
雖不曾看見長江美 夢裡常神遊長江水
雖不曾聽見黃河壯 澎湃洶湧在夢裡
古老的東方有一條龍 她的名字就叫中國
古老的東方有一群人 他們全都是龍的傳人
巨龍腳底下我成長 長成以後是龍的傳人
黑眼睛黑頭髮黃皮膚 永永遠遠是龍的傳人
百年前寧靜的一個夜 巨變前夕的深夜裡
槍砲聲敲碎了寧靜夜 四面楚歌是姑息的劍 ※洋人的劍
多少年砲聲仍隆隆 多少年又是多少年
巨龍巨龍你擦亮眼 永永遠遠的擦亮眼 (x6)
『何人』的嗎?於是只願記得
一簾幽夢
故事一開始以「今天家裡有宴會」七個字破題,設定在汪家豪宅中汪展鵬 ( 汪父 ) 和舜娟 ( 汪母 ) 的銀婚紀念日,除了銀婚的汪父母外 ,就屬汪家最值得讓人驕傲的長女汪綠萍為眾所矚目的焦點,以及次女汪紫菱與費雲帆在宴會上的第一次邂逅。
汪綠萍除了樣貌出眾之外,更有著出色的才華,無論是學業、舞蹈 ,向來都是汪家在眾親友中的驕傲。相形之下妹妹汪紫菱就暗淡無光了,她從小活潑好動又 古靈精怪,愛玩不愛讀書,高中畢業後,大學連年重考卻都沒考上。汪母一直為她操心頭痛,總是拿優秀的姊姊跟她比,無形中帶給她更多的精神壓力。雖然紫菱不 喜歡被傳統觀念所束縛,向來都抱持著不在乎的態度,可是人還是有尊嚴的 ,她的「失意」使她對自己一直沒有自信,在眾人面前抬不起頭來 。
另一個家庭楚家,與汪家是莫逆之交,兒子楚濂與汪家兩姊妹從小就是青梅竹馬。楚濂是業界知名的建築設計工程師,與綠萍從小就被汪楚兩家視為天生一 對,早已在家長和親友的眼中訂了親,楚濂與綠萍兩人也因此順勢而感情甚篤的同進同出,雖然三人常玩在一起,但紫菱總是被冷落一旁,一直扮演著「電燈泡」的 角色。然而 ,他們長大以後,楚濂漸漸發覺自己愛的並不是綠萍,而是早已對妹妹紫菱有著濃厚的情愫,因為他喜歡紫菱的活潑、調皮、不拘小節,而不能接受綠萍 的「太完美」如同水晶玻璃的藝術品一樣。而紫菱,竟也從小暗戀著楚濂,只因為她認為楚濂是姊姊的,任何玩具、食物都能跟姊姊搶,但「情人」怎能跟姊姊搶 呢? 所以,她始終將她的白馬王子──楚濂埋藏在心底。
費雲帆是一位有著龐大的國際事業、不凡的人生經歷與成熟穩重的男子,是汪家多年來的好友,但他一直讓人詬病的是離了好幾次婚 。他幾乎邁入中年,論輩 分應是紫菱他們的叔叔,但在親友交誼中 ,多次與紫菱相談甚歡,相差幾乎 20 歲的兩人,竟也能相知又相逢 。其實從另一個角度來看,雲帆雖然有成功的事業,但在感情上的挫敗,一直是他自卑的地方,所以,一個「情場失意」的費雲帆,一 個「考場失意」的汪紫菱,即使年齡有差距,卻有著同病相憐的情感。
在一次楚濂替紫菱溫習功課的機會中,楚濂毅然決然向紫菱訴說出自己埋藏已久的情愫,紫菱也承認自己一直暗戀著他,但紫菱不願傷害姊姊,於是拒絕了楚 濂的愛,而楚濂則認為長痛不如短痛,與其和綠萍在公認之中結婚造成三人的痛苦,還不如快刀斬亂麻坦白面對並終結這場三角戀,於是,他決定約綠萍出來,向綠 萍提出分手。不料,楚濂卻因自己心神不寧和罪惡感,騎車失神,載著綠萍出了車禍,綠萍也因此而斷了一條腿,更斷了她的舞蹈之路。
這場車禍來的不是時候!楚濂是在還沒表明分手之前出車禍的,所以綠萍依然不知道楚濂的心事。車禍使得楚濂永遠不敢再提分手,因為是他害綠萍失去一條 腿和後半人生,她必須負起所有的責任,他必須娶綠萍。而紫菱,該如何面對自己所愛的楚濂變成自己的「姊夫」? 故事中紫菱的一句經典台詞:「恭喜你做我的姊夫!」一語道盡了他們兩人心中難以釐清的千頭萬緒。一直在紫菱無助時伸出援手、當她靠山的費雲帆,是否能替他 們解決這場三角戀? 直到發生車禍,綠萍都不知道楚濂其實愛的是妹妹紫菱這個事實,是否在以後錯綜複雜的感情糾葛中,她會發現這個事實的真相,而造成另一階段的心靈打擊?
的矣!終只剩苦苦繼續找尋『返鄉』之路的乎!!
民歌
鄉間小路
原唱:葉佳修
作詞:葉佳修
作曲:葉佳修
演唱:齊豫
走在鄉間的小路上
暮歸的老牛是我同伴
藍天配朵夕陽在胸膛
繽紛的雲彩是晚霞的衣裳
笑意寫在臉上
哼一曲鄉居小唱
任思緒在晚風中飛揚
多少落莫惆悵
都隨著晚風飄散
遺忘在鄉間的小路上
荷把鋤頭在肩上
牧童的歌聲在蕩樣
喔~~~他們唱
還有一隻短笛隱約在吹響



 ,而且如果『初始條件』︰該物位置在原點,速度為零。那麼任意時刻的『速度』是
,而且如果『初始條件』︰該物位置在原點,速度為零。那麼任意時刻的『速度』是  ,『位置』為
,『位置』為  。這麼簡易的算術有什麼重要嗎?若是我們可以『追跡物體 』,舉凡相機拍照的防震、手腳運動之練習、肢體平衡復健的監督﹐…… 實有著不勝枚舉之『用途』。然而『微機電』所作的『慣性感測器』 IMU ,一有免不了的『加速度』之『度量誤差』,此誤差在長『時間』的『積累』下將越來『錯誤』越大!再者那個『量測值』只能是『加速度』的『時間序列』
。這麼簡易的算術有什麼重要嗎?若是我們可以『追跡物體 』,舉凡相機拍照的防震、手腳運動之練習、肢體平衡復健的監督﹐…… 實有著不勝枚舉之『用途』。然而『微機電』所作的『慣性感測器』 IMU ,一有免不了的『加速度』之『度量誤差』,此誤差在長『時間』的『積累』下將越來『錯誤』越大!再者那個『量測值』只能是『加速度』的『時間序列』  ,因此
,因此  到
到  時刻間之事也就不得不有『假設』的了!!就像此處問答所說的一樣︰
時刻間之事也就不得不有『假設』的了!!就像此處問答所說的一樣︰






 是某時的人口數,
是某時的人口數, 是自然成長率,
是自然成長率,  是環境承載力。求解後得到
是環境承載力。求解後得到
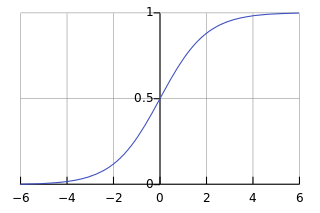
 是初始條件。 Verhulst 將這個函數稱作『logistic function』,於是那個微分方程式也就叫做『 logistic equation』。假使用
是初始條件。 Verhulst 將這個函數稱作『logistic function』,於是那個微分方程式也就叫做『 logistic equation』。假使用  改寫成
改寫成  ,將它『標準化』,取
,將它『標準化』,取  與
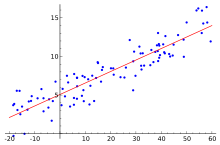
與  ,從左圖的解答來看,
,從左圖的解答來看,  ,也就是講人口數成長不可能超過環境承載力的啊!
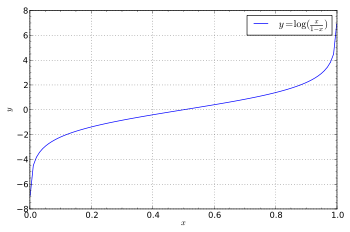
,也就是講人口數成長不可能超過環境承載力的啊! 的反函數,得到
的反函數,得到  ,這個反函數被稱之為『Logit』函數,定義為
,這個反函數被稱之為『Logit』函數,定義為
 和
和  ,或許更能體會『兩極性』的吧!!
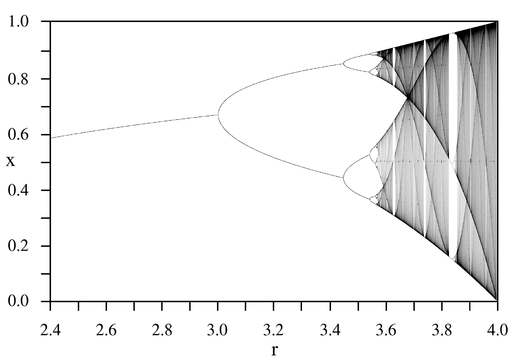
,或許更能體會『兩極性』的吧!! 。這個遞迴關係式很像是『差分版』的『 logistic equation』,竟然是產生『混沌現象』的經典範例。假使說一個『遞迴關係式』有『極限值』
。這個遞迴關係式很像是『差分版』的『 logistic equation』,竟然是產生『混沌現象』的經典範例。假使說一個『遞迴關係式』有『極限值』 的話,此時
的話,此時  ,可以得到
,可以得到  ,於是
,於是  或者
或者  。在
。在  之時,『單峰映象』或快或慢的收斂到『零』; 當
之時,『單峰映象』或快或慢的收斂到『零』; 當  之時,它很快的逼近
之時,它很快的逼近  ;於
;於  之時,線性的上下震盪趨近
之時,線性的上下震盪趨近  也收斂到
也收斂到  時,對幾乎各個『初始條件』而言,系統開始發生兩值『震盪現象』,而後變成四值、八值、十六值…等等的『持續震盪』;最終於大約
時,對幾乎各個『初始條件』而言,系統開始發生兩值『震盪現象』,而後變成四值、八值、十六值…等等的『持續震盪』;最終於大約  時,這個震盪現象消失了,系統就步入了所謂的『混沌狀態』的了!!
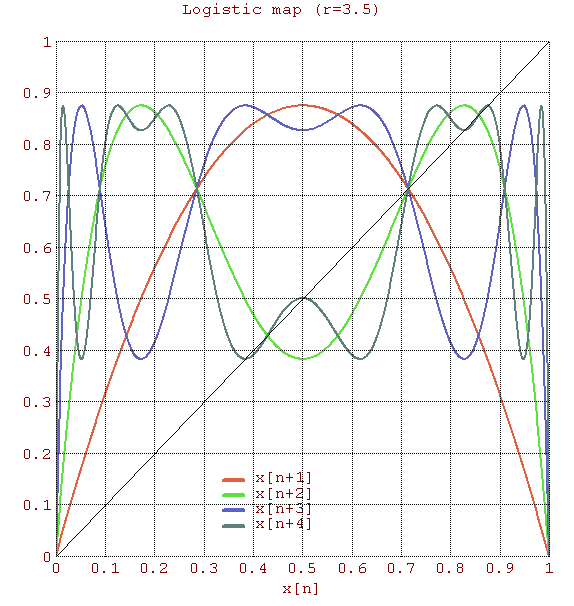
時,這個震盪現象消失了,系統就步入了所謂的『混沌狀態』的了!! 的『迭代求值』︰
的『迭代求值』︰ 。當
。當  ,這個
,這個  就是『定點』,左圖中顯示出不同的
就是『定點』,左圖中顯示出不同的 ![\Delta P(t) = P(t + \Delta t) - P(t) = \left( r P(t) \left[ 1 - P(t) \right] \right) \cdot \Delta t](http://www.freesandal.org/wp-content/ql-cache/quicklatex.com-f862e9b7a6f8941170eb4a06470c1d45_l3.png "Rendered by QuickLaTeX.com") ,假使取
,假使取  ,可以得到
,可以得到 ![P(n + 1) - P(n) = r P(n) \left[ 1 - P(n) \right]](http://www.freesandal.org/wp-content/ql-cache/quicklatex.com-a2bcd9e1f12ec10b81e56b84b4810ef4_l3.png "Rendered by QuickLaTeX.com") ,它的『極限值』
,它的『極限值』  ,根本與
,根本與  看成
看成  ,這樣
,這樣 ![\frac{x[(n+1) \Delta t] - x[n \Delta t]}{\Delta t} = x_{n+1} - x_n](http://www.freesandal.org/wp-content/ql-cache/quicklatex.com-099817979576eb719a1d1161a407d71d_l3.png "Rendered by QuickLaTeX.com") 就說是『速度』的了,於是
就說是『速度』的了,於是  便構成了假想的『
便構成了假想的『 時,
時, ,因為
,因為  ,所以
,所以  ,於是
,於是  ,因此
,因此  。再者由於『指數項』
。再者由於『指數項』  是『偶數』,所以此『符號動力系統』不等速 ──
是『偶數』,所以此『符號動力系統』不等速 ──  來講,它的解是
來講,它的解是
 是『初始條件』參數,可由
是『初始條件』參數,可由  來決定。假使
來決定。假使  這個『周期函數』,多次『迭代』後就可能產生『極限循環』;要是
這個『周期函數』,多次『迭代』後就可能產生『極限循環』;要是 


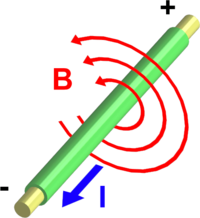
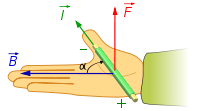
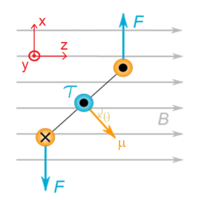



 是『載流導線』
是『載流導線』 上的微小『線元素』,
上的微小『線元素』, 是那個線元素所載的『電流』量,而
是那個線元素所載的『電流』量,而  是『磁常數』。
是『磁常數』。
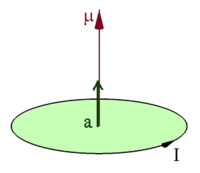
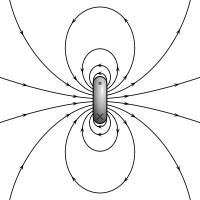
 是圍繞導線的『閉合路徑』,
是圍繞導線的『閉合路徑』, 是『磁通量感應』強度,
是『磁通量感應』強度, 是此路徑上的微小『線元素』向量,
是此路徑上的微小『線元素』向量, 是『閉合迴徑』
是『閉合迴徑』