過去作文曾有所謂『起承轉合』之論,然而天下文章天下人寫,又何必拘泥於『套式』的呢?倘若一招半式尚未學習,又何彷拘泥於『套式』的呢!終究寫作者之表述,需要閱讀者能明白,所以詞能達意、議論清楚、文字通順 …… 其初始,足矣哉。
有答之問之所生,或在原理不能貫通、習焉而未能察、概念內蘊尚無法甚解 …… ,因作此破題之問︰
【既知】
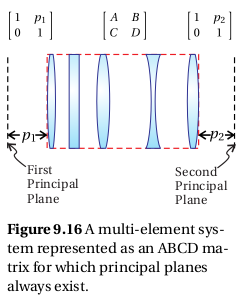
假使一個任意複雜之光學系統竟能夠『等效』於一片『薄透鏡』豈非太美妙耶!且聽聽 Justin Peatross 和 Michael Ware 先生們之大哉論也
※ 註︰ 若一光學系統光線進、出介質折射率相同,則
 。
。
顯然  不等於零。
不等於零。
─── 摘自《光的世界︰矩陣光學六戊》
【已知】
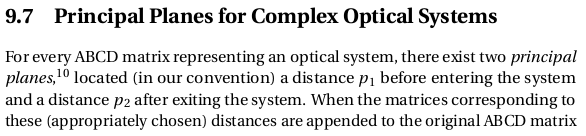
前三篇文本中,我們談了一般『光學矩陣』

只要  ,都可借著『自由空間』
,都可借著『自由空間』

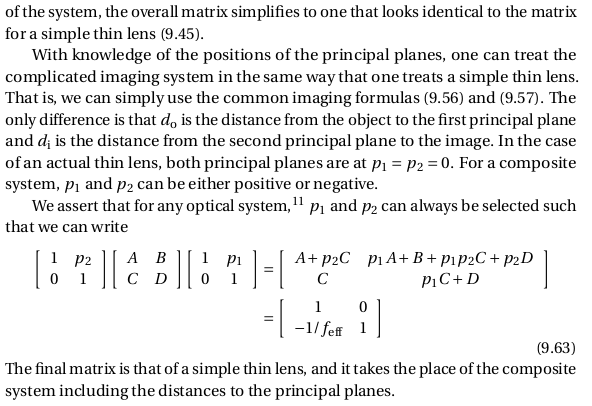
化成一個等效之『薄透鏡』
 。
。
因此在『主平面』之參考系裡,分享著同樣的『成像公式』

,具有相同『成像條件』,  參數為
參數為 
 。
。
甚至可以『串接成像』

的矣!如是就確定了參數 之『聚焦』地位,以及參數  的『影像縮放』性質!!
的『影像縮放』性質!!
─── 摘自《光的世界︰矩陣光學六庚》
【且知】
現象既因相距  之兩透鏡之組合而起︰
之兩透鏡之組合而起︰
物 → 光 …… → 透鏡  → 距離 → 透鏡
→ 距離 → 透鏡  …… → 像
…… → 像
且先列出其『光學矩陣』表達式︰

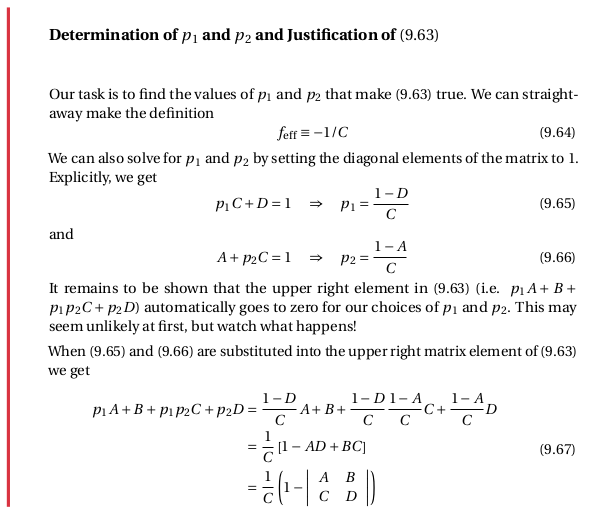
已知若其『等效』於『薄透鏡』,焦距  等於
等於  。所以曉
。所以曉
‧  時,
時,  。
。
‧  或
或  時,組合焦距可由該式算出。
時,組合焦距可由該式算出。
因是問題就落在  的時候了。但思此刻之前、之後恰是
的時候了。但思此刻之前、之後恰是  變號之際,也是組合透鏡或聚、或散性質變化之處,故而特殊的耶!!??
變號之際,也是組合透鏡或聚、或散性質變化之處,故而特殊的耶!!??
─── 摘自《光的世界︰矩陣光學六壬》
莫非是原理不足以解釋現象成因的呢??還是條件太過複雜以至於難以解析耶!!或因為『薄透鏡』之理想性而想入非非的乎︰
若問為什麼平面上的一個一般三角形可以如下圖表示
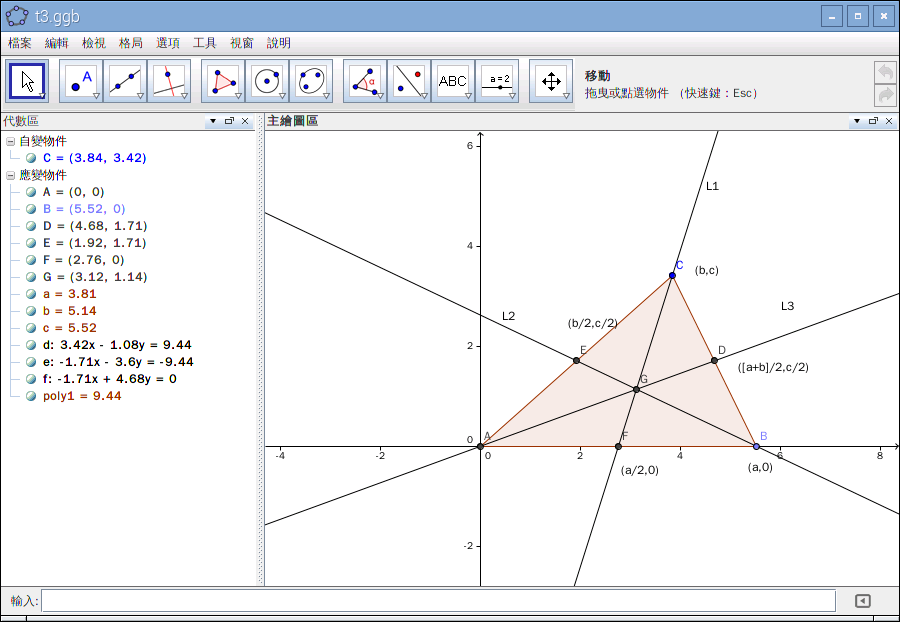
, 只用著  三個參數?即使在思考過
三個參數?即使在思考過  是『底』之『長』,
是『底』之『長』,  是此『底』之『高』,
是此『底』之『高』,  是此『高』距與此『底』一端的距離。我們深信這就『確定』了那個三角形。然而若再問︰如果此三角形的三個頂點用更一般的
是此『高』距與此『底』一端的距離。我們深信這就『確定』了那個三角形。然而若再問︰如果此三角形的三個頂點用更一般的  、
、  、
、  來表達 ,如是分明有六個參數。那麼這兩種『表述』當真是一樣的嗎?設想你在桌面上『移動』一個三角形,從此『位置』此『方位』到達彼『位置』彼『方位』,你會認 為這個三角形『改變』了嗎??假使『直覺』以為『不變』,這個三角形就必得有使之『不變』的『因由』,這個『因由』不必『參照』解析幾何的『座標』而確立 。或可說它就是歐式幾何一個三角形的『定義』內涵而已。如此而言,一個『確定』的三角形,可由它的三個『邊長』來『確立』,所以六個參數補之以三個確定之 邊長關係,豈非還是三個參數的耶??
來表達 ,如是分明有六個參數。那麼這兩種『表述』當真是一樣的嗎?設想你在桌面上『移動』一個三角形,從此『位置』此『方位』到達彼『位置』彼『方位』,你會認 為這個三角形『改變』了嗎??假使『直覺』以為『不變』,這個三角形就必得有使之『不變』的『因由』,這個『因由』不必『參照』解析幾何的『座標』而確立 。或可說它就是歐式幾何一個三角形的『定義』內涵而已。如此而言,一個『確定』的三角形,可由它的三個『邊長』來『確立』,所以六個參數補之以三個確定之 邊長關係,豈非還是三個參數的耶??
因為這個『歐式幾何』的『留白』,常使人懷疑『解析幾何』簡化『座標系』的『選擇』,到底『圖形』的『自由度』是幾何的了。說難道易,就請讀者思索︰平面上的『 □ 』與『 ○ 』,到底一方一圓需要幾個參數來描述的呢?
從物理上講,那個三角形就是『剛體』 rigid body ,它在『運動』中保持『形狀』的『不變性』。
─── 摘自《勇闖新世界︰ W!o《卡夫卡村》變形祭︰品味科學‧教具教材‧【專題】 PD‧箱子世界‧留白》
現象之理則的推演千絲萬縷,其歸結唯一而已矣☆