特技
Acrobatics
Acrobatics (from Greek ἀκροβατέω akrobateō, “walk on tiptoe, strut”[1]) is the performance of extraordinary human feats of balance, agility, and motor coordination. It can be found in many of the performing arts, sports (sporting) events, and martial arts. Acrobatics is most often associated with activities that make extensive use of gymnastic elements, such as acro dance, circus, and gymnastics, but many other athletic activities — such as ballet and diving — may also employ acrobatics. Although acrobatics is most commonly associated with human body performance, it may also apply to other types of performance, such as aerobatics.

Chinese acrobat in midair after being propelled off aspringboard, China, 1987
背後沒有物理學嗎?無論『體操』與『雜耍』是否『美學』追求真的不同??得以實現之『原理』差異真有那麼大嘛!
此處假借
Acrobot
One further interesting example is that of the acrobot. The model can be regarded as a simplified gymnast hanging on a horizontal bar with both hands. The movements of the entire system is to be controlled only by movement of the hip. The body of the gymnast is represented by two rods which are jointed in the joint  . The first rod is movably connected at joint
. The first rod is movably connected at joint  with the inertial system, which corresponds to the encompassing of the stretching rod with the hands.
with the inertial system, which corresponds to the encompassing of the stretching rod with the hands.
For the model, two equal-length rods with a length  are assumed with a homogeneous distribution of mass
are assumed with a homogeneous distribution of mass  over the entire rod length. This does not correspond to the proportions of a man, also no restrictions were placed on the mobility of the hip joint.
over the entire rod length. This does not correspond to the proportions of a man, also no restrictions were placed on the mobility of the hip joint.
The following figure shows the schematic representation of the model.

Using the previously assumed model parameters and the write abbreviations
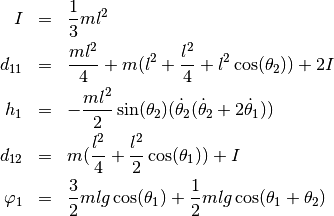
as well as the state vector ![x = [\theta_2, \dot{\theta}_2, \theta_1, \dot{\theta}_1]](https://pytrajectory.readthedocs.io/en/master/_images/math/c248fb58cf6727bb6dc4ad322f5adf60f5a1de3a.png) one obtains the following state representation with the virtual input
one obtains the following state representation with the virtual input 
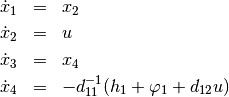
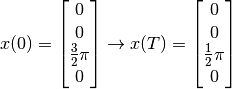
Now, the trajectory of the manipulated variable for an oscillation of the gymnast should be determined. The starting point of the exercise are the two downward hanging rods. These are to be transferred into another rest position in which the two bars show vertically upward within an operating time of ![T = 2 [s]](https://pytrajectory.readthedocs.io/en/master/_images/math/48ac522661f248b225e21d35d8eb668d3cd75a73.png) . At the beginning and end of the process, the input variable is to merge continuously into the rest position
. At the beginning and end of the process, the input variable is to merge continuously into the rest position  .
.
The initial and final states thus are
※ 運動方程推導參讀
Mark W. Spong
http://ieeecss.org/CSM/library/1995/feb1995/02-swingupctrlprob.pdf

說這『轉動控制』  難能之事,也想再次確認 PyTrajectory 的執行也!!
難能之事,也想再次確認 PyTrajectory 的執行也!!





一時還來不及『比較』
Underactuated Manipulator
In this section, the model of an underactuated manipulator is treated. The system consists of two bars with the mass  and
and  which are connected to each other via the joint . The angle between them is designated by
which are connected to each other via the joint . The angle between them is designated by  . The joint connects the first rod with the inertial system, the angle to the
. The joint connects the first rod with the inertial system, the angle to the  -axis is labeled
-axis is labeled  . In the joint the actuating torque
. In the joint the actuating torque  is applied. The bars have the moments of inertia
is applied. The bars have the moments of inertia  and
and  . The distances between the centers of mass to the joints are
. The distances between the centers of mass to the joints are  and
and  .
.

The modeling was taken from the thesis of Carsten Knoll (April, 2009) where in addition the inertia parameter  was introduced.
was introduced.
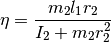
For the example shown here, strong inertia coupling was assumed with  . By partial linearization to the output
. By partial linearization to the output  one obtains the state representation with the states
one obtains the state representation with the states ![x = [\theta_1, \dot{\theta}_1, \theta_2, \dot{\theta}_2]^T](https://pytrajectory.readthedocs.io/en/master/_images/math/6da61fe06c2df2463181a37044965c25e76f0e9d.png) and the new input
and the new input  .
.
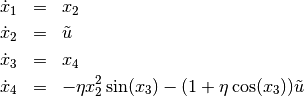
For the system, a trajectory is to be determined for the transfer between two equilibrium positions within an operating time of ![T = 1.8 [s]](https://pytrajectory.readthedocs.io/en/master/_images/math/de54e9885ba8acb1b3187f17ccdd191539a5b832.png) .
.
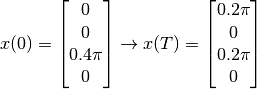
The trajectory of the inputs should be without cracks in the transition to the equilibrium positions ( ).
).
的呦☆☺