《鞦韆曲》清‧鮑之蕙
芳園四壁花光聞,鞦韆動處朝霞飛。
美人妝成對花立,欲上不上嬌無力。
㩳身一舉穿林梢,流鶯驚起花旛搖。
翩然反側妙容與,隱隱紅潮上眉𡧃。
藕絲裙輭罥游蜂,杏子衫輕濕香雨。
拖煙約霧東風顛,珠翠彷彿雲中斬。
琤瑽仙珮潄嗚玉,蘭香萼綠相齊肩。
紅纏雪腕綵索勁,綠鬆雲髮金釵偏。
小鬢扶下日初轉,徙倚花陰息嬌喘。
栩栩魂猶夢蝶驚,行行足訝蒼苔輭。
美人會得春難駐,不放芳華等閒度。
來日清明風雨多,落紅滿地奈愁何。
盪鞦韆有道乎?
秋千搖蕩千秋已,
春暖花開打韆鞦。
不管己身有無力,
想方設法出枝頭。
借力使力之術而已耶??
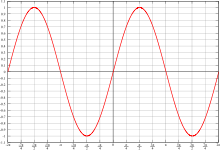
圓周運動的思路,帶給我們另一種考察『受驅振子』系統行為的觀點。在此再次引用《【Sonic π】聲波之傳播原理︰振動篇》一文中的方程式
頻率為  的正弦驅動力
的正弦驅動力
此時系統的方程式為

 是驅動力的振幅大小。在線性微分方程式如
是驅動力的振幅大小。在線性微分方程式如  的『求解』裡,如過『
的『求解』裡,如過『 』是
』是  的一個解,『
的一個解,『 』是 一個『特解』,那麼『
』是 一個『特解』,那麼『 』就是該方程是的『通解』。我們已經知道
』就是該方程是的『通解』。我們已經知道  的『低阻尼振子』之解在若干個弛豫時間後數值將變得太小了,所以它對於系統長時間之後的『行為』沒有太多的貢獻。因此我們說這個系統的『穩態解』steady-state solution 是
的『低阻尼振子』之解在若干個弛豫時間後數值將變得太小了,所以它對於系統長時間之後的『行為』沒有太多的貢獻。因此我們說這個系統的『穩態解』steady-state solution 是
 ,此處
,此處

是『響應阻抗』函數。而  是驅動力引發的相位角,可由
是驅動力引發的相位角,可由

所決定,一般它表達著相位『遲滯』 lag 現象。

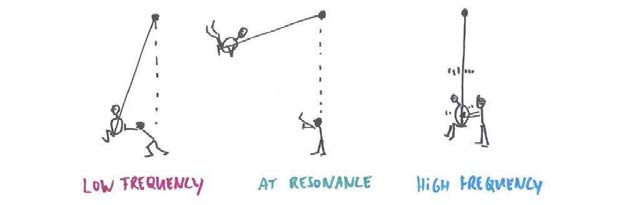
從圓周運動觀點來看,力的最『有效運用』只在於『克服阻力』,不論對抗或者協同『虎克力』,就是要改變系統的『自然振動』之頻率,因此『頻率偏離』愈大愈『多勞少功』。 一式就是這個度量,它在
一式就是這個度量,它在  時為『零』。試著幫一個『盪鞦韆』的小女孩『越盪越快』,就可以體驗這和『越盪越高』是很不相同的一回事 !!
時為『零』。試著幫一個『盪鞦韆』的小女孩『越盪越快』,就可以體驗這和『越盪越高』是很不相同的一回事 !!
─── 摘自《【SONIC Π】聲波之傳播原理︰共振篇《三下》》
古人說︰雖小道亦有可觀之處!蓋道法自然也!!
其實牛頓的蘋果︰

夏娃的蘋果

金蘋果事件

牛頓的蘋果

圖靈的蘋果
根據《聖經‧創世記》記載︰
亞當和夏娃二人住在伊甸園中,後來夏娃受『蛇』的哄誘,偷食了『知善惡樹』所結的『禁果』,也讓亞當食用,二人遂被上帝逐出伊甸園。
□︰禁果是蘋果嗎?
○︰莫宰羊!
□︰那蘋果是禁果嗎?
○︰煩惱即菩提!!
也許希臘神話中關鍵之因緣生法的一顆『金蘋果』── 獻給最美女神 ──,引發 → 帕里斯的評判,導致 → 特洛伊戰爭。明示了『蘋果』與『誘惑』的關係,至於說怎麼聯繫上了『知識』,那只能問『牛頓』的了?
雖說『牛頓』並沒有創造『機械的宇宙』,如果仔細考察『運動定律』,假使再加上『物質組構』的『構造方程式』與『初始條件』── 位置和動量 ──,那麼該物之『運動軌跡』就被『確定』了。這演示了一種『軟體設計』之方法學,它以『資料驅動』為中心。或許艾倫‧圖靈非常了解那個『抽象機械』,所以創想發明了『萬有圖靈機』。只不過人類的知識還很難駕馭那樣的『仙女計算機』,然而隨著一九六零年代以來『硬體描述語言』 HDL hardware description language 的發展,也許我們終將受邀進入『計算機械的世界』,一探『軟硬體的真諦』!『圖靈的蘋果』正述說著『尊重』與『寬容』,如今想來他早已『知道』這些『演算法』了的吧!!
─── 摘自《大樹底下好乘涼 ︰ 《大哉問》》
早就種下︰


只是過去難以『解析』,不易『明白』耳??!!
故此引用
雙重積分器
雙重積分器(double integrator)是控制理論中,典型二階控制系統的例子[1]。雙重積分器描述一個質量在一維空間內,受時變力 輸入下的位置變化。
輸入下的位置變化。

一個用PD控制來控制的系統,受控體即為雙重積分
狀態空間表示法
雙重積分器的正規化狀態空間模型如下


- 依照此模型,輸入 是輸出
 的二階導數,因此名為雙重積分器。
的二階導數,因此名為雙重積分器。
簡單範例





說這『計算』推步之事,方便『體驗』矣!!??
