
![]()
![]()
湖山一夢事全非,
再見雲龍向北飛;
三百年來終一日,
長天碧水歎瀰瀰。
丑牛︰木牛流馬因何作?一日特行數十里。 ![]() 控
控 ![]() 制機巧在內中。庖丁解牛何其神!得之於手,應乎心!!
制機巧在內中。庖丁解牛何其神!得之於手,應乎心!!
![]() 派 ︰追趕跑跳皆控制,行走坐臥須練習,一旦到達忘我時,熟能生巧自然通。
派 ︰追趕跑跳皆控制,行走坐臥須練習,一旦到達忘我時,熟能生巧自然通。
《 莊子‧內 篇‧養生主第三 》
吾生也有涯,而知也無涯。以有涯隨無涯,殆已!已而為知者,殆而已矣!為善無近名,為惡無近刑,緣督以為經,可以保身,可以全生,可以養親,可以盡年。
庖丁為文惠君解牛,手之所觸,肩之所倚,足之所履,膝之所踦,砉然響然,奏刀騞然,莫不中音,合於桑林之舞,乃中經首之會。
文惠君曰:「嘻,善哉!技蓋至此乎?」
庖丁釋刀對曰:「臣之所好者道也,進乎技矣。始臣之解牛之時,所見無非全牛者﹔三年之后,未嘗見全牛也﹔方今之時,臣以神遇而不以目視,官知止而神欲行。依乎天理,批大卻,導大窾,因其固然。技經肯綮之未嘗微礙,而況大軱乎!良庖歲更刀,割也﹔族庖月更刀,折也﹔今臣之刀十九年矣,所解數千牛矣,而刀刃若新發於硎。彼節者有閒,而刀刃者無厚,以無厚入有閒,恢恢乎其於游刃必有餘地矣。是以十九年而刀刃若新發於硎。雖然 ,每至於族,吾見其難為,怵然為戒,視為止,行為遲,動刀甚微 ,謋然已解,牛不知其死也,如土委地。提刀而立,為之而四顧,為之躊躇滿志,善刀而藏之。」
文惠君曰:「善哉!吾聞庖丁之言,得養生焉。」
公文軒見右師而驚曰:「是何人也?惡乎介也?天與?其人與?」
曰:「天也,非人也。天之生是使獨也,人之貌有與也。以是知其天也,非人也。」
澤雉十步一啄,百步一飲,不蘄畜乎樊中。神雖王,不善也。
老聃死,秦失弔之,三號而出。
弟子曰:「非夫子之友邪?」
曰:「然。」
「然則弔焉若此,可乎?」
曰:「然。始也吾以為其人也,而今非也。向吾入而弔焉,有老者哭之,如哭其子﹔少者哭之,如哭其母。彼其所以會之,必有不蘄言而言,不蘄哭而哭者。是遁天倍情,忘其所受,古者謂之遁天之刑。適來,夫子時也﹔適去,夫子順也。安時而處順,哀樂不能入也,古者謂是帝之縣解。」
指窮於為薪,火傳也,不知其盡也 。
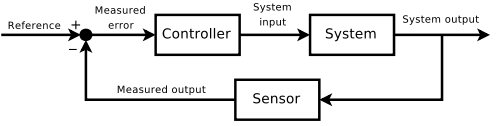
△ Control theory is an interdisciplinary branch of engineering and mathematics that deals with the behavior of dynamical systems with inputs, and how their behavior is modified by feedback. The usual objective of control theory is to control a system, often called the plant, so its output follows a desired control signal, called the reference, which may be a fixed or changing value. To do this a controller is designed, which monitors the output and compares it with the reference. The difference between actual and desired output, called the error signal, is applied as feedback to the input of the system, to bring the actual output closer to the reference. Some topics studied in control theory are stability; whether the output will converge to the reference value or oscillate about it; controllability and observability.
Extensive use is usually made of a diagrammatic style known as the block diagram. The transfer function, also known as the system function or network function, is a mathematical representation of the relation between the input and output based on the differential equations describing the system.
Although a major application of control theory is in control systems engineering, which deals with the design of process control systems for industry, other applications range far beyond this. As the general theory of feedback systems, control theory is useful wherever feedback occurs; a few examples are in physiology, electronics, climate modeling, machine design, ecosystems, navigation, neural networks, predator-prey interaction, and gene expression.
其後又出諾伯特‧維納者,年一九四八發表《模控學》,
△ Cybernetics is a transdisciplinary[1] approach for exploring regulatory systems, their structures, constraints, and possibilities. Cybernetics is relevant to the study of systems, such as mechanical, physical, biological, cognitive, and social systems. Cybernetics is applicable when a system being analyzed incorporates a closed signaling loop; that is, where action by the system generates some change in its environment and that change is reflected in that system in some manner (feedback) that triggers a system change, originally referred to as a “circular causal” relationship. Some say this is necessary to a cybernetic perspective. System dynamics, a related field, originated with applications of electrical engineering control theory to other kinds of simulation models (especially business systems) by Jay Forrester at MIT in the 1950s.
Concepts studied by cyberneticists (or, as some prefer, cyberneticians) include, but are not limited to: learning, cognition, adaptation, social control, emergence, communication, efficiency, efficacy, and connectivity. These concepts are studied by other subjects such as engineering and biology, but in cybernetics these are abstracted from the context of the individual organism or device.
Norbert Wiener defined cybernetics in 1948 as “the scientific study of control and communication in the animal and the machine.”[2] The word cybernetics comes from Greek κυβερνητική (kybernetike), meaning “governance”, i.e., all that are pertinent to κυβερνάω (kybernao), the latter meaning “to steer, navigate or govern”, hence κυβέρνησις (kybernesis), meaning “government”, is the government while κυβερνήτης (kybernetes) is the governor or the captain. Contemporary cybernetics began as an interdisciplinary study connecting the fields of control systems, electrical network theory, mechanical engineering, logic modeling, evolutionary biology, neuroscience, anthropology, and psychology in the 1940s, often attributed to the Macy Conferences. During the second half of the 20th century cybernetics evolved in ways that distinguish first-order cybernetics (about observed systems) from second-order cybernetics (about observing systems).[3] More recently there is talk about a third-order cybernetics (doing in ways that embraces first and second-order).[4]
Fields of study which have influenced or been influenced by cybernetics include game theory, system theory (a mathematical counterpart to cybernetics), perceptual control theory, sociology, psychology (especially neuropsychology, behavioral psychology, cognitive psychology), philosophy, architecture, and organizational theory.[5]
卻說道人誰知未來而今在眼前??

科技啊!理雖可通,實務總恐追之不及!!
![]() 碼︰無
碼︰無 ![]() 習。 ☿☹
習。 ☿☹
☿ ![]() 行︰雖只知 PWM 之名,偶讀
行︰雖只知 PWM 之名,偶讀
《 How to use soft PWM in RPi.GPIO 0.5.2a pt 2 – led dimming and motor speed control 》之文,縱未解其實,何不試行一番︰
#!/usr/bin/python3
# -*- coding: utf-8 -*-
import RPi.GPIO as GPIO
from time import sleep
import random
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
紅LED = 35
綠LED = 47
GPIO.setup(紅LED, GPIO.OUT)
GPIO.setup(綠LED, GPIO.OUT)
紅燈 = GPIO.PWM(紅LED, 100)
綠燈 = GPIO.PWM(綠LED, 100)
間歇值 = 0.02
紅燈.start(0)
綠燈.start(100)
try:
while True:
for i in range(0,101):
紅燈.ChangeDutyCycle(i)
綠燈.ChangeDutyCycle(100 - i)
sleep(間歇值)
for i in range(100,-1,-1):
紅燈.ChangeDutyCycle(i)
綠燈.ChangeDutyCycle(100 - i)
sleep(間歇值)
except KeyboardInterrupt:
紅燈.stop()
綠燈.stop()
GPIO.cleanup()
☿☺ 既已涉抄襲,羞於全錄者也! ☿
☆ 編者言![]()
由於編者並不能知 M♪o 所讀是何《文》?只好自己胡亂假借寫來!故特此說明,以正視聽。
![]() 訊︰ ☿☺ 學而時習之,不亦樂乎!
訊︰ ☿☺ 學而時習之,不亦樂乎!