
電流的單位是『安培』
電容的單位是『法拉』

頻率的單位是『赫茲』
馬克士威方程式
牛頓後的物理學第二次統一
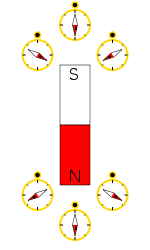
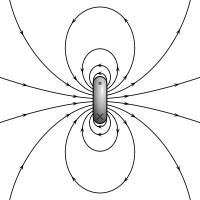
古代人從『天然磁石』中認識了『磁性』,發現了那是會吸引鐵的『石頭』。希臘文中『磁鐵』的意思就是『來自馬格尼西亞 Magnesia 的石頭』;中國有關天然磁石吸引鐵以及製備磁鐵的描述文獻,可見之於《管子》、《呂氏春秋》、和《淮南子》,稱之為『慈石』。約在西元前十二至十三世紀,中國、歐洲和其它地區的人已經用磁鐵做成的『指南針』來導航。然而『學術性』論述的發展,最早是一二六九年法國學者皮埃‧德馬立克 Pierre de Maricourt 所寫的《磁石書信》,他仔細標明了『鐵針』在塊狀磁石附近多個位置的『定向』,並用這些『定向記號』描繪出很多條『磁力線』,於是發現了這些『磁力線』聚會於磁石的『兩端』,就好比地球的經線交會於『南極』與『北極』。因此,他將這兩個特殊位置稱之為『磁極』。三百年後,威廉‧吉爾伯特主張『地球』本身就是一個大磁石,地球的磁極分別位於南極與北極。他的巨著《論磁石》開創了『磁學』這一門『科學』領域。
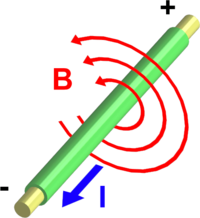
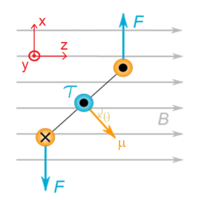
一八二零年是『磁學』發展的『黃金年』,吹響了現代『電磁理論』的號角。七月,丹麥物理學家漢斯‧奧斯特 Hans Ørsted 發現『載流導線的電流會施加作用力於磁針,使磁針偏轉指向。』;據聞在這條新聞抵達法國科學院僅僅一周後 ,法國化學家安德烈‧瑪麗‧安培 André-Marie Ampère 成功的實驗演示︰假使兩條平行導線所載的電流的『方向相同』 ,則會『互相吸引』;如果電流的『方向相反』,就會『彼此排斥』。 十月,法國物理學家讓‧巴蒂斯特‧必歐 Jean-Baptiste Biot 與法國物理學家菲利克斯‧沙伐 Félix Savart 共同發表了『靜磁學』的『磁場』方程式,現今叫做『必歐‧沙伐定律』

,此處  是『載流導線』
是『載流導線』 上的微小『線元素』,
上的微小『線元素』, 是那個線元素所載的『電流』量,而
是那個線元素所載的『電流』量,而  是『磁常數』。
是『磁常數』。
一八二四年法國數學家西莫恩‧德尼‧帕松 Siméon Denis Poisson 發展了一種類似『靜電學』電荷概念的『磁荷』理論來描述『磁場』。這個『物理模型』以『同類磁荷互相排斥,異類磁荷彼此吸引』,說明『磁性』是如何由『磁荷』產生的。雖然這個理論能夠解釋許多『磁場現象』,可是並無法說明『電磁感應』的現象,同時『分割磁鐵』最終也得不到『磁北極』、『磁南極』這樣的『磁單極』,縱使過往以來有一些物理學家持續『努力尋找』,至今依舊是『毫無跡象』的哇!其後一八二五年安培又發表了『安培定律』,說明『載流導線』所載的電流,與所引發的『磁通量』沿著圍繞導線的『閉合路徑』的關係為

此處, 是圍繞導線的『閉合路徑』,
是圍繞導線的『閉合路徑』, 是『磁通量感應』強度,
是『磁通量感應』強度, 是此路徑上的微小『線元素』向量, 是『磁常數』,
是此路徑上的微小『線元素』向量, 是『磁常數』, 是『閉合迴徑』 中所圈住的『電流量』。
是『閉合迴徑』 中所圈住的『電流量』。
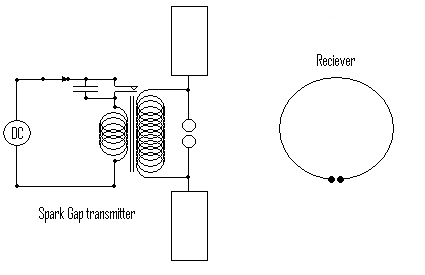
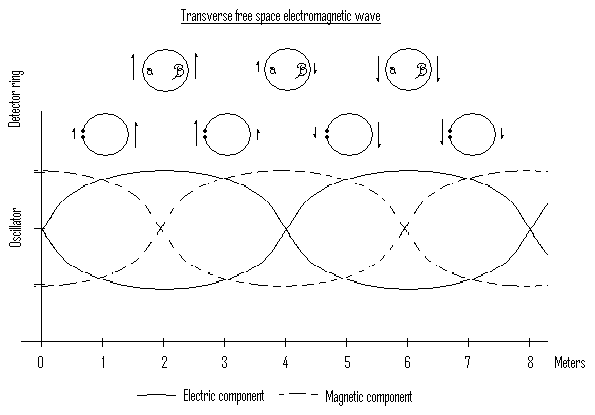
一八三一年,英國物理學家麥可‧法拉第 Michael Faraday 實驗證實『隨著時間而變化的磁場會生成電場』,這使得『電』與『磁』的關係更加密切。從一八六一年蘇格蘭數學物理學家詹姆斯‧克拉克‧馬克士威 James Clerk Maxwell 將『電學』與『磁學』的各種雜亂表述『方程式』加以整合,發表於在《論物理力線》On Physical Lines of Force 一文中,這方程組能夠解釋古典電學和磁學的各種現象。一八六五年,馬克士威在《電磁場的動力理論》A Dynamical Theory of the Electromagnetic Field 論文中,成功的擴充了『安培定律』,並以『分子渦流模型』提出『位移電流』的存在原由。現今稱之為『馬克士威修正項目』。其後他更推導出『電磁波方程式』,並且斷言『光』是一種『電磁波』!!終於一八八七年德國物理學家海因里希‧赫茲 Heinrich Hertz 做實驗證明了這個『電磁波』的事實。馬克士威方程式統一了『電學』、『磁學』與『光學』理論,成為今天所說的『經典電磁學』!!
如果以『總電荷』和『總電流』為源頭的表述為︰




假使用『自由電荷』和『自由電流』作考慮的表述是︰


一九零五年,愛因斯坦的『狹義相對論』解釋了︰『電場』和『磁場』是處於不同『參考座標系』的『觀察者』所觀察到之同樣的『物理現象』!!
─── 《【SONIC Π】電聲學導引《六》》
若說『電磁轉子』是近代文明之推手,那個『具體物』
馬達
電動機(英文:Electric motor),又稱為馬達、摩打或電動馬達,是一種將電能轉化成機械能,並可再使用機械能產生動能,用來驅動其他裝置的電氣設備。大部分的電動馬達通過磁場和繞組電流,為馬達提供能量。
電動機與發電機原理基本一樣,其分別在於能量轉化的方向不同 :發電機是藉由負載(如水力、風力)將機械能、動能轉為電能 ;若沒有負載,發電機不會有電流流出。電動機和電力電子、微控器配合已形成一新學門,稱為電動機控制。
Animation of an Electric motor.
歷史

1827年的馬達
1740年,第一個電動馬達是由蘇格蘭僧侶安德魯·戈登(Andrew Gordon)創建的簡單的靜電設備。1827年,匈牙利物理學家安幼思·傑德利克(ÁnyosJedlik)開始嘗試用電磁線圈進行實驗。傑德利克解決一些技術問題後,稱他的設備為「電磁自轉機」。雖然只用於教學目的,但第一款傑德利克的設備已包含今日直流馬達的三個主要組成部分:定子,轉子和換向器。
1835年,美國一位鐵匠湯馬斯·達文波特(Thomas Davenport)製作出世界上第一台能驅動小電車的應用馬達,並在1837年申請了專利。由於主要動力電池成本極高,在商業上不成功,達文波特破產。一些發明家繼續發展應用馬達,但都遇到了同樣電池發電成本的問題。
1845年,英國物理學家惠斯頓(Wheatstone)申請線性馬達的專利,但原理於1960年代才被重視,而設計了實用性的線性馬達每次目前已被廣泛在工業上應用。
1870年代初期,世界上最早可商品化的馬達由比利時電機工程師Zenobe Theophile Gamme所發明。1888年,美國著名發明家尼古拉·特斯拉應用法拉第的電磁感應原理,發明交流馬達,即為感應馬達。
1902年,瑞典工程師丹尼爾森利用特斯拉感應馬達的旋轉磁場觀念,發明了同步馬達。1923年,蘇格蘭人James Weir French發明三相可變磁阻型(Variable reluctance)步進馬達。
1962年,藉霍爾元件之助,實用之DC無刷馬達終於問世。1980年代,實用之超音波馬達開始問世。
原理
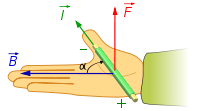
馬達的旋轉原理的依據為佛來明左手定則或是右手開掌定則,當一導線置放於磁場內,若導線通上電流,則導線會切割磁場線使導線產生移動。電流進入線圈產生磁場,利用電流的磁效應,使電磁鐵在固定的磁鐵內連續轉動的裝置,可以將電能轉換成動能。與永久磁鐵或由另一組線圈所產生的磁場互相作用產生動力。
電動機的種類很多,以基本結構來說,其組成主要由定子和轉子所構成。定子在空間中靜止不動,轉子則可繞軸轉動,由軸承支撐。定子與轉子之間會有一定空氣間隙(氣隙),以確保轉子能自由轉動。機殼(場軛)需要用高導磁係數材料製成,要當作磁路用。
直流馬達的原理是定子不動,轉子依交互作用所產生作用力的方向運動。交流馬達則是定子繞組線圈通上交流電,產生旋轉磁場,旋轉磁場吸引轉子一起作旋轉運動。
此圖中旋轉磁場是由三個不同相位線圈產生的磁場向量形成
就是明證。故而仍舊得入『機電互動』之門也。
所以始於『指南車』者︰
大科學家張衡是東漢士大夫、天文學家、地理學家、數學家、發明家、文學家,南陽西鄂人,製作以水力推動的『渾天儀』,發明能探測地震方位的『候風地動儀』以及『指南車』。他發現了月蝕的真正原因,也曾繪製兩千五百顆星辰的星圖。稱名漢賦四大家之一,文學上創作了〈二京賦〉、〈歸田賦〉等等辭賦名篇 。



『渾天儀』就是現在的天球儀,用來演示天體運動的規律。假使其中加有『窺管』一般叫做『渾儀』,可以協助觀測天文。歷史上記載戰國時期的石申、甘德最早製作『渾象』,即是渾天儀。
傳說黃帝軒轅製造『指南車』大敗炎帝於『阪泉之戰』。指南車又叫做『司南』是一種指示方向的工具。指南車並不是『羅盤』那一類使用『磁極』的指向器物。指南車的結構使用了『差動齒輪』裝置,也叫做『差速器』。物理原理是指南車直走時,左右兩輪轉動角速度相等,差動裝置不傳動『司南者』,彎行時兩側車輪的角速度就不相等,差動機制驅動著司南者『逆其差』,因此『司南者』恆『司南』。其後不知何故,指南車的製造方法就失傳了。一九二四年英國學者穆爾 Moule 發表了研究指南車的論文並根據《宋史》文獻記載給出了具體的『復原方案』。一九三七年王振鐸發表了《指南車記里鼓車之考證及模製》一文,其中改良了穆爾的設計,並且成功的製作出指南車模型。一九七一年他根據史書記載,又成功的複製了馬鈞的『黃帝指南車』。大千世界中,忽而得之,忽而失之,得得失失,何干之於大千??
─── 摘自《【SONIC Π】聲波之傳播原理︰拾遺篇《一》候風地動儀‧上》
只因原理易明︰
Differential wheeled robot
A differential wheeled robot is a mobile robot whose movement is based on two separately driven wheels placed on either side of the robot body. It can thus change its direction by varying the relative rate of rotation of its wheels and hence does not require an additional steering motion.
To balance the robot, additional wheels or casters may be added.
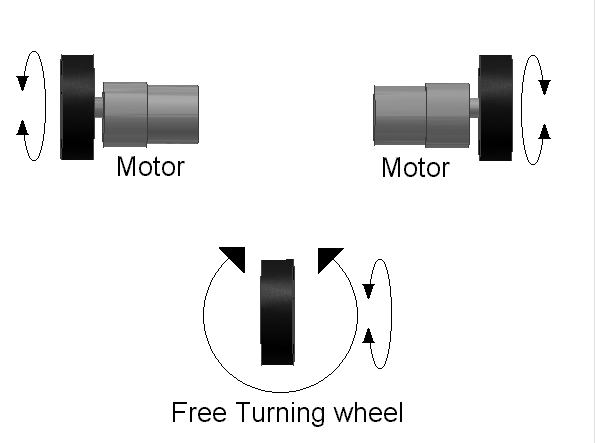
A three-wheeled differentially steered robot
Details

If both the wheels are driven in the same direction and speed, the robot will go in a straight line. If both wheels are turned with equal speed in opposite directions, as is clear from the diagram shown, the robot will rotate about the central point of the axis. Otherwise, depending on the speed of rotation and its direction, the center of rotation may fall anywhere on the line defined by the two contact points of the tires. While the robot is traveling in a straight line, the center of rotation is an infinite distance from the robot. Since the direction of the robot is dependent on the rate and direction of rotation of the two driven wheels, these quantities should be sensed and controlled precisely.
A differentially steered robot is similar to the differential gears used in automobiles in that both the wheels can have different rates of rotations, but unlike the differential gearing system, a differentially steered system will have both the wheels powered. Differential wheeled robots are used extensively in robotics, since their motion is easy to program and can be well controlled. Virtually all consumer robots on the market today use differential steering primarily for its low cost and simplicity.[citation needed]
更何況早已有範例的啊☆★
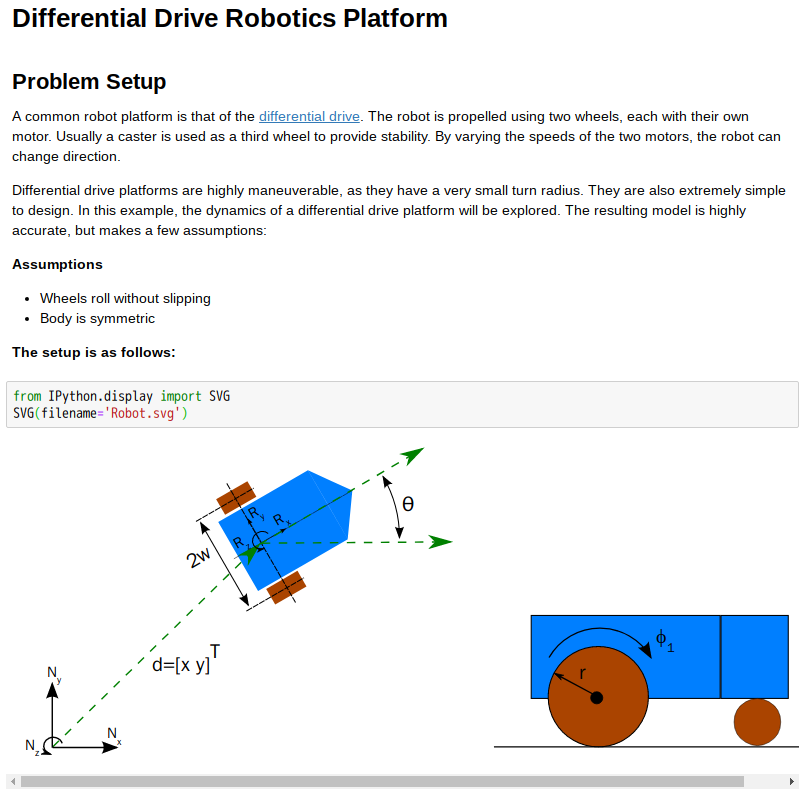
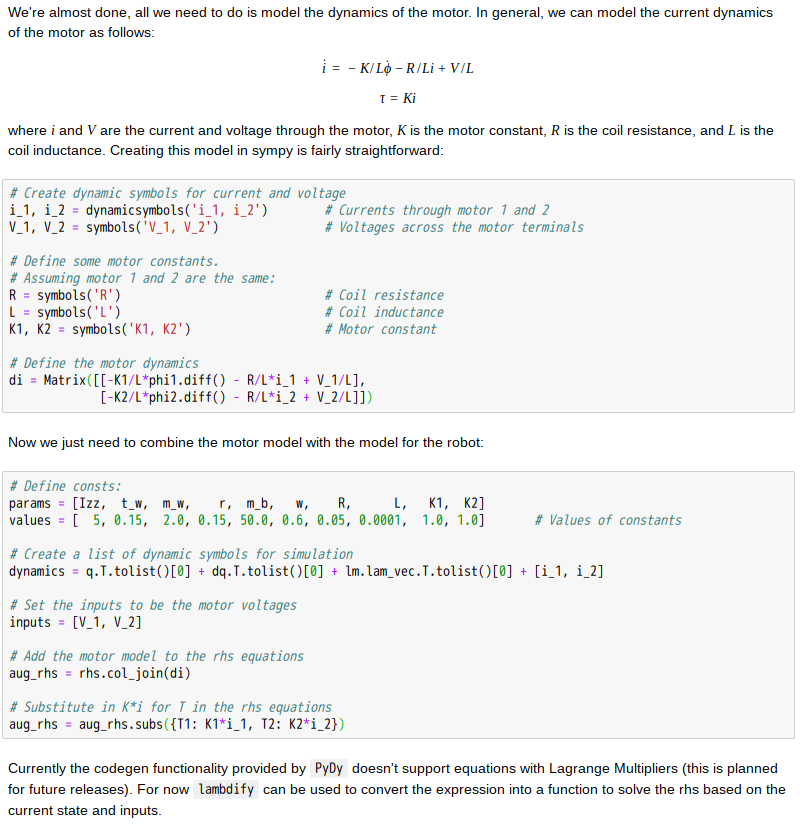
pydy_examples/differential_drive/
Differential Drive Dynamics – Part 1
Sun 16 March 2014 — under sympy, pydy, dynamics, example
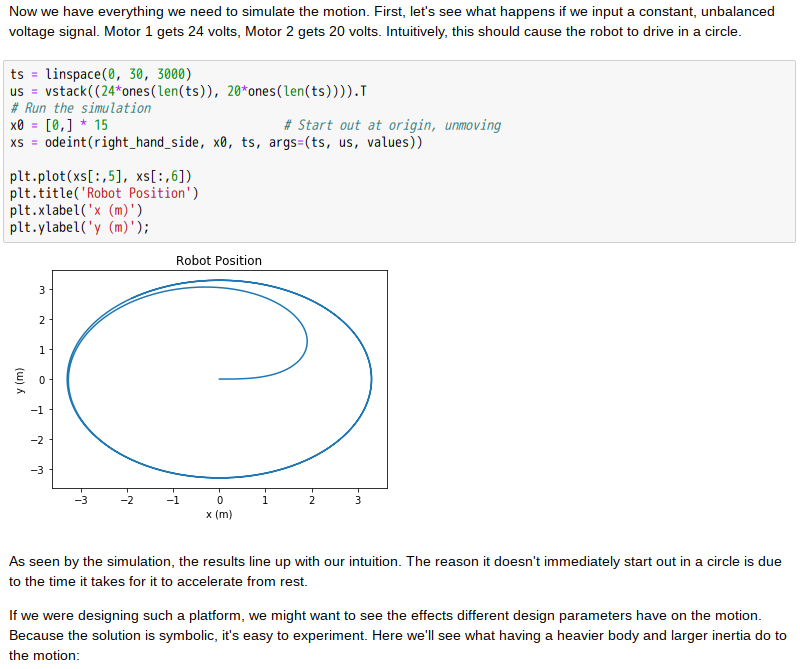
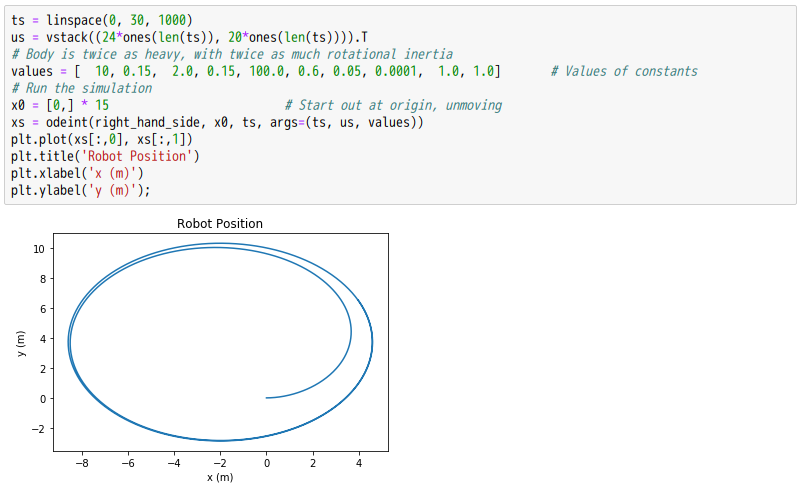
……
………