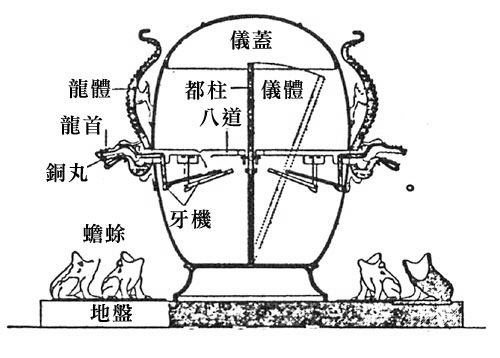
據知最早中國考古學家王振鐸花費五年的時間,參考結合英國科學家的『地震理論』,根 據范曄後漢書裡的『一百九十六』個字終於一九五一年再現了『第一臺』候風地動儀。祇是雖然這臺『候風地動儀』深獲肯定,它卻沒能夠測出『北京時間』一九七六年七月二十八日凌晨三點四十二分五十八秒,距離北京僅只有一百五十公里的『河北省唐山市』的『超大地震』。那一次地震的『震央』距離地表只有六公里,唐山市竟被頃刻間夷為了平地,這個大慘劇近代史稱之為『唐山大地震』。由是之故,『候風地動儀』大概也只能是『故事裡的事』,因此也不得不把它歸之於『神話傳說』中之『知震神器』的了!!
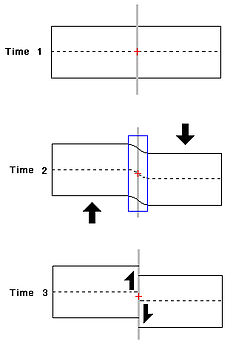
本以為將『落幕的故事』風雲再起,二零零二年中國科學院的教授馮銳注意到先前地震儀之王振鐸『復原模型』恐有『原理性』之『錯誤』,於是開啟了『候風地動儀』研究的『第二章』!馮銳的主要觀點在於『機、關』兩字『原意』的『重新解讀』!果真是『江山代有才人出,各領風騷五百年』的啊!!
假使從『結果論』的觀點來講﹐也就是王振鐸的『模型設計』,它在『地震』來時,觸發不了『機關』,因此『龍不能吐丸』的了。
【錯誤的製作原理】
人們常有一種『迷思』,或者認為後人的科技當然優於前人,因此說『古不如今』;也有的人講『今不如古』,要不然怎麼會那麼多的『失傳技藝』無法再現。唐代韓愈在《師說》中提出了『聞道有先後,術業有專攻,如是而已。』的觀點,或許可以『釋疑』 。假使說今有人『立志』做個『大廚』,以能『庖丁解牛』為楷模,那麼『化學』、『營養學』、『熱力學』種種可能與『食物』和『做菜』有關的『科學』與『知識』,是否都一定得要是『先修課』,否則就做不出『好吃的菜』呢?恐怕這樣會是『遠近親疏』不分的『不著要點』的吧!設想另一人他祇是在家『開始做菜』,還是『邊做邊學』,只從『家人反應』得知『好吃與否』,因著對『料理熱情』,一再的『改善自身』做菜基本的『料、工、火侯』處理方法,『喜聞』各種『食』相關的『技藝』與『文化』,知道後不僅僅『如法泡製』,他還嘗試『加油添醋』,如是能數十年如一日,這樣他的某些『家常菜』,是否其他的『名廚』就能『做的出來』的呢??即使就『做菜』一事而言,『善做菜』是一件事,『教做菜』是另一回事,就是能『說的一口好菜』 也是不容易的事情啊!!
《韓愈‧師說》
古之學者必有師。師者,所以傳道、受業、解惑也。人非生而知之者,孰能無惑?惑而不從師,其為惑也,終不解矣。
生乎吾前,其聞道也,固先乎吾,吾從而師之。生乎吾後,其聞道也,亦先乎吾,吾從而師之。吾師道也,夫庸知其年之先後生於吾乎?是故無貴,無賤,無長,無少,道之所存,師之所存也。
嗟乎!師道之不傳也久矣!欲人之無惑也難矣!古之聖人,其出人也遠矣,猶且從師而問焉。今之眾人,其下聖人也亦遠矣,而恥學於師。是故聖益聖,愚益愚,聖人之所以為聖,愚人之所以為愚,其皆出於此乎?
愛其子,擇師而教之,於其身也,則恥師焉,惑矣!彼童子之師,授之書而習其句讀者,非吾所謂傳其道、解其惑者也。句讀之不知,惑之不解,或師焉,或不焉,小學而大遺,吾未見其明也。
巫、醫、樂師,百工之人,不恥相師;士大夫之族,曰師、曰弟子云者,則群聚而笑之。問之,則曰:「彼與彼年相若也,道相似也。」位卑則足羞,官盛則近諛。嗚呼!師道之不復可知矣。巫、醫、樂師、百工之人,君子不齒,今其智乃反不能及,其可怪也歟!
聖人無常師,孔子師郯子、萇弘、師襄、老聃。郯子之徒,其賢不及孔子。孔子曰:「三人行,必有我師。」是故弟子不必不如師,師不必賢於弟子,聞道有先後,術業有專攻,如是而已。
李氏子蟠,年十七,好古文,六藝經傳,皆通習之。不拘於時,學於余,余嘉其能行古道,作師說以貽之。
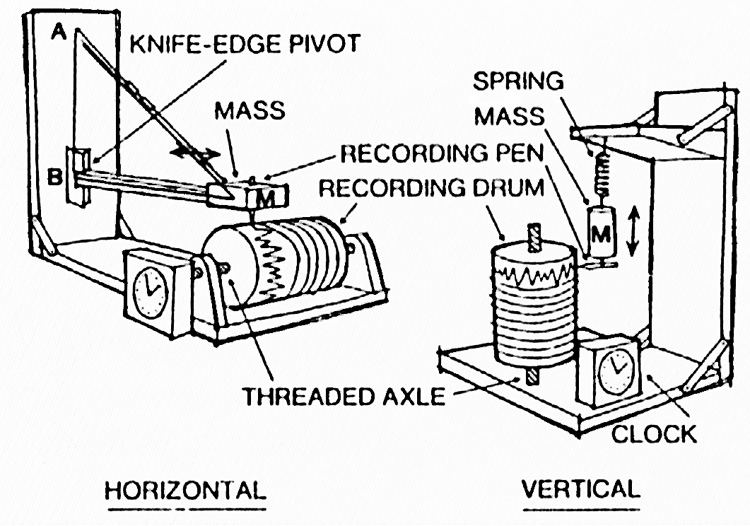


一八八零年代英國地理學家約翰‧米爾恩 John Milne 、詹姆斯‧艾佛烈‧尤因 James Alfred Ewing 與托馬斯‧格雷 Thomas Gray 三人在日本工作時,發明了第一台『精準的地震儀』Seismometer,其機制使用『水平式阻尼單擺』 Damped horizontal pendulums,並以『光擺』方式放大『振動信號』,藉此將『地震波』紀錄在『高感光』相紙上。在第二次世界大戰後,米爾恩的設計幾乎成了地震儀的『世界標準』。
現今地震儀漸漸的使用『電子感測器』electronic sensors,某些地震儀已經可以量測振動頻率由  至
至  的範圍。
的範圍。
馮銳在各國的地動儀模型中,注意到了現代地震學之父約翰‧米爾恩將後漢書中范曄『中有都柱』翻譯成『中間有一根柱子,這根柱子是懸掛著的』。在地震發生時,高處懸掛的『吊燈』,由於『慣性作用』對『水平運動』非常『敏感』,所以吊燈也就『搖晃』的特別厲害。據考古發現早在漢代就已經有了『吊燈』,難道這就是張衡之所以用著『懸垂擺』的緣故??
【懸垂擺原理】
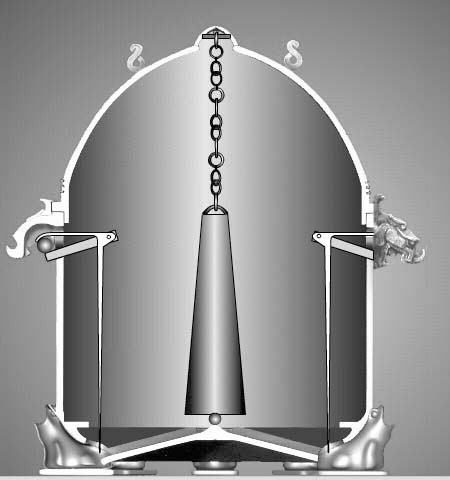
二零零五年四月馮銳帶領的工作小組,終於依據且符合那一百九十六個字,重新復現了候風地動儀。其後驗之以『地震』,果然是『神龍吐丸』,『月魄蟾蜍』銜之鏗鏘。
那麼為什麼『候風地動儀』會失傳的呢?據馮銳的說法是
自公元一三二年張衡發明候風地動儀以來,接連發生了幾次地震,到公元一三四年的隴西地震,張衡名氣大造,候風地動儀也聲名遠播。然而因著『天象』結合了『政爭』,頻起的『地震』 究竟是『誰的過錯』?懺緯之說如是說︰地震起於『用人不當』,此上天之所以『罰罪』。縱使張衡有『天才之能』亦『無力分說』那個『地震之是非』。因此公元一三四年有『高官免職』後,張衡的『官運』也就步上了『黯淡之途』。由於沒有人希望能夠再『測出地震』,這時那個候風地動儀已經成為了『不祥之器』!短短幾年後,到了公元一三九年張衡抑鬱而逝。東漢末年,公元一九零年,董卓一把大火燒毀了『洛陽城』,一切終歸於『灰飛煙滅』!!
── 也許科學與玄學的大戰,始終是伺機而動的吧!! ──







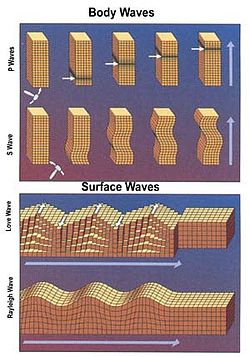
 波,沿著斷層面的相對位移則形成『剪力波』被叫做
波,沿著斷層面的相對位移則形成『剪力波』被叫做  波。
波。 波走時差
波走時差
 波速度,
波速度, 波速度,
波速度, 震央和測站距離,
震央和測站距離, 走時差
走時差



![u_D(x, t) = \frac{1}{2}\left[u_0(x - c t) + u_0(x + c t)\right] + \frac{1}{2c} \int_{x - c t}^{x + c t} v_0(\xi) \, d\xi](http://www.freesandal.org/wp-content/ql-cache/quicklatex.com-3f6acfdf0be5364a1e390671e489b064_l3.png "Rendered by QuickLaTeX.com")
 受力為
受力為  的質點在
的質點在  軸上的『加速度運動』
軸上的『加速度運動』

 上看,假使一開始
上看,假使一開始  就在『在波前』
就在『在波前』 的
的  處作記號的『點』
處作記號的『點』  的時刻會在
的時刻會在  的『當下處』
的『當下處』  之位置,也就是它們是說屬於『同一相位』
之位置,也就是它們是說屬於『同一相位』  的『波前』,由於『波前形狀』
的『波前』,由於『波前形狀』 對所有的『記號點』
對所有的『記號點』 也是『保形的』,因是之故當我們在『
也是『保形的』,因是之故當我們在『 時刻
時刻 位置
位置![u(x^{'}, t^{'}) = \frac{1}{2}\left[u_0(x^{'} - c t^{'}) + u_0(x^{'} + c t^{'})\right] + \frac{1}{2c} \int_{x^{'} - c t^{'}}^{x^{'} + c t^{'}} v_0(\xi) \, d\xi](http://www.freesandal.org/wp-content/ql-cache/quicklatex.com-20cad3000792ceaca0641985cee7bc29_l3.png "Rendered by QuickLaTeX.com")
 中
中  、『波長』
、『波長』  和『速度』
和『速度』 有一定的關係式︰
有一定的關係式︰ 。如果參考『單擺系統』的『時間』用『單擺週期』
。如果參考『單擺系統』的『時間』用『單擺週期』  來度量,是一個『無因次純量』
來度量,是一個『無因次純量』 ,那麼很自然的一個物理系統『空間』之『度量』,也應當用著該系統中的『長度物理量』,在此也就是那個波的『波長』
,那麼很自然的一個物理系統『空間』之『度量』,也應當用著該系統中的『長度物理量』,在此也就是那個波的『波長』  來表達,
來表達, 也是『無因次純量』。這樣向右波形就可以改寫成
也是『無因次純量』。這樣向右波形就可以改寫成 。
。
 對於相位
對於相位  的『函數圖形』。假使從『時刻』
的『函數圖形』。假使從『時刻』 來觀看,
來觀看, ,此處
,此處  ,就是此波的整體『空間樣態』。如果在『位置』
,就是此波的整體『空間樣態』。如果在『位置』  ,此時
,此時  ,也就是此波此處的『歷時形貌』,這就是一個波之『相位』的『時空觀』。因此更可以了解惠更斯所說『波前』的物理意義是以『時間』為軸,來描述波的『空間樣態』到底會如何『隨時變化』。
,也就是此波此處的『歷時形貌』,這就是一個波之『相位』的『時空觀』。因此更可以了解惠更斯所說『波前』的物理意義是以『時間』為軸,來描述波的『空間樣態』到底會如何『隨時變化』。
 就是『波數』
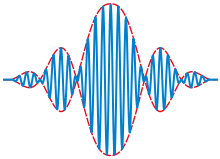
就是『波數』 的『波速函數』。假使一個『波形』是由多個『頻率』組成,在『色散介質』中傳播,長時間來看大概很難『保形』的了。短時間的觀點來說,我們講那個『波包』wave packet 整體用著
的『波速函數』。假使一個『波形』是由多個『頻率』組成,在『色散介質』中傳播,長時間來看大概很難『保形』的了。短時間的觀點來說,我們講那個『波包』wave packet 整體用著  的群速度在變化。左圖是深水『表面重力』波,圖中用著『紅點』表示『相速度』,以及『綠點』表示『群速度』。
的群速度在變化。左圖是深水『表面重力』波,圖中用著『紅點』表示『相速度』,以及『綠點』表示『群速度』。 來講,各個頻率的成份波都跑得一樣快,這時
來講,各個頻率的成份波都跑得一樣快,這時



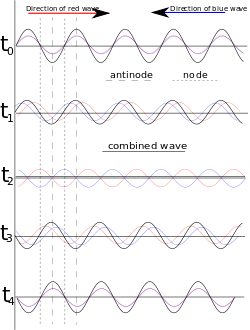

 與向右的波
與向右的波  疊加後的『合成波』
疊加後的『合成波』 ,在『特定』的『邊界條件』下,被『侷限』在一定『空間區域』內無法前進,因此稱為『駐波』。由於駐波不能傳播能量,它的能量將『儲存』在那個空間區域裡。駐波所在區域,『振幅為零』的點稱為『節點』或『波節』Node ,『振幅最大』的點位於兩『節點』之間,通常叫做『腹點』或『波腹』Antinode。
,在『特定』的『邊界條件』下,被『侷限』在一定『空間區域』內無法前進,因此稱為『駐波』。由於駐波不能傳播能量,它的能量將『儲存』在那個空間區域裡。駐波所在區域,『振幅為零』的點稱為『節點』或『波節』Node ,『振幅最大』的點位於兩『節點』之間,通常叫做『腹點』或『波腹』Antinode。
 震盪的弦上,一個向右的簡諧波
震盪的弦上,一個向右的簡諧波  ,由於弦的兩頭固定,那個波在右端點也只能『反射』回來,形成了
,由於弦的兩頭固定,那個波在右端點也只能『反射』回來,形成了  ,此時合成波
,此時合成波  是
是

 時,
時, ,此處
,此處  是整數,這就是『節點』;當
是整數,這就是『節點』;當  時
時  ,也就是『腹點』。當然波長
,也就是『腹點』。當然波長  的邊界條件。
的邊界條件。 ,
, ,
,
![\left[I_m(\cdots, t) \Rightarrow_{S} O_m(\cdots, t)\right] \Rightarrow_{S} \left[I_m(\cdots, t + \tau) \Rightarrow_{S} O_m(\cdots, t + \tau)\right]](http://www.freesandal.org/wp-content/ql-cache/quicklatex.com-4fdacc020a4c6714fc36227ae1061aa3_l3.png "Rendered by QuickLaTeX.com")



 處質點除了受到了
處質點除了受到了  之力,還遭受到外力
之力,還遭受到外力  ,因此
,因此![m{\partial^2u(x+h,t) \over \partial t^2}= k[u(x+2h,t)-u(x+h,t)-u(x+h,t)+u(x,t)] + F(x, t)](http://www.freesandal.org/wp-content/ql-cache/quicklatex.com-3667f9641894dba13de62e8357fb25a2_l3.png "Rendered by QuickLaTeX.com")
 將上式改寫為
將上式改寫為
 ,
, 是每單位線段質量的所受之力,因次是『加速度』。如果說這個彈簧鏈模型是『自然現象』的『適當』物理模型,那麼無論這根『弦』現在是在什麼樣的『物理狀態』,只要我們知道它的『初始狀態』──
是每單位線段質量的所受之力,因次是『加速度』。如果說這個彈簧鏈模型是『自然現象』的『適當』物理模型,那麼無論這根『弦』現在是在什麼樣的『物理狀態』,只要我們知道它的『初始狀態』──  時刻的『物理狀態』
時刻的『物理狀態』
 時刻,這時系統的『外力』
時刻,這時系統的『外力』 ,因此這『等同於』求解在
,因此這『等同於』求解在 

 『時距』中的『貢獻值』
『時距』中的『貢獻值』
 在
在 



 ,『力』是
,『力』是 ,與『機械能』稱
,與『機械能』稱 ,將『熱能』的『單位』叫做
,將『熱能』的『單位』叫做 就因此會是『兩種』的嗎?假使兩人描述『同一』自然現象,在彼此使用的『單位換算』後,竟然能夠是『答案不同』的嗎??
就因此會是『兩種』的嗎?假使兩人描述『同一』自然現象,在彼此使用的『單位換算』後,竟然能夠是『答案不同』的嗎?? 制中,一般力的『度量單位』是『牛頓』Newton,通常用
制中,一般力的『度量單位』是『牛頓』Newton,通常用  代表。那你怎麼知道『一牛頓的力』有多大呢? 其實它有個『定義』︰
代表。那你怎麼知道『一牛頓的力』有多大呢? 其實它有個『定義』︰
 使質量
使質量  物體的加速度為
物體的加速度為  時所需要的力
時所需要的力 來的,因此
來的,因此  之『
之『 的『
的『 』這個度量單位,都是表達牛頓第二運動定律中『力』、『質量』和『加速度』的『概念』間的『物理量』的『單位度量關係』。由於我們是從『質量』和『加速度』的基礎物理量之『大小』,來定義『力的單位』,所以說『牛頓』是一個衍生的『導出單位』。如果比較 CGS 制『一達因的力』之『定義』
』這個度量單位,都是表達牛頓第二運動定律中『力』、『質量』和『加速度』的『概念』間的『物理量』的『單位度量關係』。由於我們是從『質量』和『加速度』的基礎物理量之『大小』,來定義『力的單位』,所以說『牛頓』是一個衍生的『導出單位』。如果比較 CGS 制『一達因的力』之『定義』
 物體的加速度為
物體的加速度為  時所需要的力
時所需要的力
 』,而『
』,而『 』都是『質量度量』單位,同樣的『
』都是『質量度量』單位,同樣的『 』中之『
』中之『 』都是『長度度量』單位。由於『自然界』並沒有偏好哪一種『度量單位』,它的選擇當然是『人為的』。其次『相同』的『度量領域』的『單位變換』,它的『變換係數』通常是無單位的數值『常數』,比方說『
』都是『長度度量』單位。由於『自然界』並沒有偏好哪一種『度量單位』,它的選擇當然是『人為的』。其次『相同』的『度量領域』的『單位變換』,它的『變換係數』通常是無單位的數值『常數』,比方說『 』中之『
』中之『 』,或者『
』,或者『 』裡的『
』裡的『 』,因為它們都是同類的度量單位。於是我們可以說『因次』就是『物理單位』中『物理概念』的『度量抽象』。舉例來講,不論長度的度量單位是『
』,因為它們都是同類的度量單位。於是我們可以說『因次』就是『物理單位』中『物理概念』的『度量抽象』。舉例來講,不論長度的度量單位是『 』…來表達,將該物理量的因次寫成『
』…來表達,將該物理量的因次寫成『

 吧,那麼虎克常數『
吧,那麼虎克常數『 』,此處
』,此處  是『無因次』的『純量』。這樣依據『虎刻定律』
是『無因次』的『純量』。這樣依據『虎刻定律』
 ,
, ,也許有人想還是『牛頓/米』比較親切的啊!這個『每秒每秒幾公斤』到底是什麼的嗎??事實上『自然定律』將各個『物理概念』聯繫了起來,於是『同類現象』或者『運動現象』在『度量上』需要與『已經定義』的『單位』保有『一致性』,能夠彼此『相容』。就像牛頓的『萬有引力』定律
,也許有人想還是『牛頓/米』比較親切的啊!這個『每秒每秒幾公斤』到底是什麼的嗎??事實上『自然定律』將各個『物理概念』聯繫了起來,於是『同類現象』或者『運動現象』在『度量上』需要與『已經定義』的『單位』保有『一致性』,能夠彼此『相容』。就像牛頓的『萬有引力』定律  ,既然是『力的範疇』,那個『萬有引力常數』
,既然是『力的範疇』,那個『萬有引力常數』

 是『力』的單位,而且符合『一牛頓的力』度量之大小『定義』。當然它的因次
是『力』的單位,而且符合『一牛頓的力』度量之大小『定義』。當然它的因次  就是『抽象』的了!要是說道兩靜電荷間作用力的『庫侖定律』
就是『抽象』的了!要是說道兩靜電荷間作用力的『庫侖定律』 ,
,
 的『因次』
的『因次』  會是『天書』的吧!其實這卻是許多『物理常數』的由來!!
會是『天書』的吧!其實這卻是許多『物理常數』的由來!! ,它的解是
,它的解是 ,此處
,此處  ,式中
,式中  ,『振幅』為
,『振幅』為  的週期運動。
的週期運動。 是『超越函數』Transcendental function,不可能表達成『有限項的多項式』,假使變數
是『超越函數』Transcendental function,不可能表達成『有限項的多項式』,假使變數 
 形式出現的因由。其實『時間』
形式出現的因由。其實『時間』 用著這個物理系統的『周期』特徵
用著這個物理系統的『周期』特徵  ,此處
,此處  稱為『無阻尼』角頻率,而
稱為『無阻尼』角頻率,而  叫做『阻尼比率』。
叫做『阻尼比率』。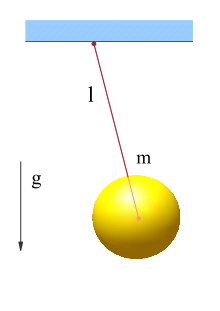
 的組合,如果用數學式表達為
的組合,如果用數學式表達為  ,這樣
,這樣  的因次必須是『時間』,假設
的因次必須是『時間』,假設  ,於是
,於是

 以及『重力加速度』
以及『重力加速度』  的關係是
的關係是
 假設成
假設成