在談談如何用『小樹林系統』之『感測器』測量『舒適度』之前,需知『氣候變遷』不止引發了『過冷』、『過熱』、『洪水』、『乾旱』、『強風』、『驟雨』…… 等等現象。雨林的消失、火耕的污染、石化燃料的霾害,在在使人不得不重視
懸浮粒子之危害︰
懸浮粒子 (Atmospheric particulate matter, particulate matter (PM), particulates),在環境科學中,特指懸浮在空氣中的固體顆粒或液滴 ,是空氣污染的主要來源之一。其中,空氣動力學直徑(以下簡稱直徑)小於或等於10微米 (µm)的懸浮粒子稱為可吸入懸浮粒子(PM10);直徑小於或等於2.5微米的懸浮粒子稱為細懸浮粒子(PM2.5)。懸浮粒子能夠在大氣中停留很長時間,並可隨呼吸進入體內,積聚在氣管或肺中,影響身體健康。
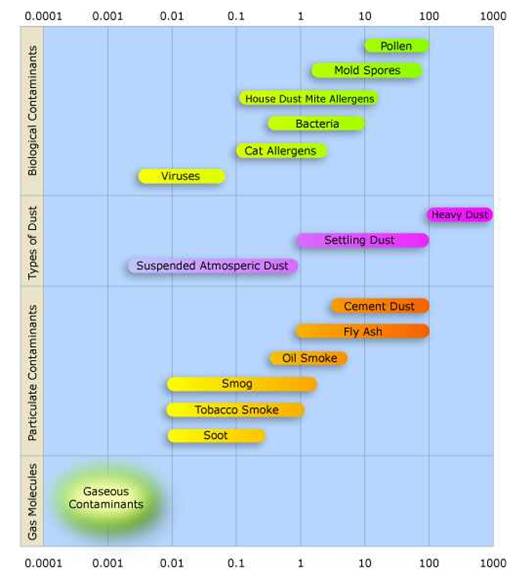
各種顆粒大小,微米(µm)。【縱軸】 biological contaminants 生物污染物 types of dust 灰塵的類型 particulate contaminants 顆粒污染物 gas molecules 氣體分子。【橫軸】pollen 花粉 mold spores 黴菌孢子 house dust mite allergens 屋塵蟎過敏原 bacteria 細菌 cat allergens 貓過敏原 virus 病毒 heavy dust 沉重的灰塵 setting dust 沉澱灰塵 suspended atmospheric dust 懸浮大氣塵 cement dust 水泥粉塵 fly ash 煤灰 oil smoke 油煙 smog 煙霧 tobacco smoke 香菸煙霧 soot 煤煙 gaseous contaminants 氣態污染物。
……
這個動畫顯示從2006年8月17日至2007年4月10日,主要對流層懸浮微粒光學厚度的射出與運送。[1][2] (click for more detail)
* 綠色:黑色和有機碳
* 紅/橙:灰塵
* 白:硫酸鹽
* 藍:海鹽
───
懸浮微粒的分布影片圖,根據美國航天局的特拉衛星中等解析度成像光譜儀的數據。
* 綠色區域顯示了較大的顆粒為主的懸浮微粒。
* 紅色區域由小顆粒懸浮微粒為主。
* 黃色區域顯示大,小混合的懸浮微粒。
* 灰色顯示了傳感器並沒有收集數據。
───
試問在一個『呼吸都嫌困難』之環境裡,又將怎麼談『舒適度』的呢??
其次棌用之公式人體舒適度指數︰

此處 T 是攝氏平均溫度, H 是相對濕度, W 是風速【m/s】
雖有出處,卻是來源不明!!讀者或可參考
這篇論文的說法︰
若是有志於此者,也可讀讀瑞典 Håkan O Nilsson 大部頭 Thesis
《 Comfort Climate Evaluationwith Thermal Manikin Methodsand Computer Simulation Modes 》
。
無論『舒適度』是否主以『熱』為中心來論述,終將及於『濕度』 、『風速』等等因素,還需以『人』為重來對待。這明確的說明了我們在此關心的不祇『物理量』之測量問題,而是『物理量』它與『生命』的『關係』。就像
空氣也有品質尺度
import time
import grovepi
# Connect the Grove Air Quality Sensor to analog port A0
# SIG,NC,VCC,GND
# 感測器之『入出埠』
air_sensor = 0
# 此『感測器』是『輸入』
grovepi.pinMode(air_sensor,"INPUT")
while True:
try:
# Get sensor value
# 此『感測器』是『Analog』
sensor_value = grovepi.analogRead(air_sensor)
# ☆☆ 品質尺度
if sensor_value > 700:
print "High pollution"
elif sensor_value > 300:
print "Low pollution"
else:
print "Air fresh"
print "sensor_value =", sensor_value
time.sleep(.5)
except IOError:
print "Error"
一樣。