什麼是『百分之一』的呢?假使活在『百分之九十九』的人都是『色盲』的社會裡,是否那 1% 就『不可能』代表『真實』的呢 ??畢竟『費曼』是一位『物理大師』,他說的『不二過』教訓
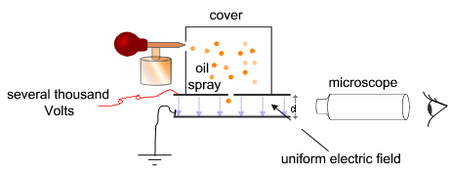
那麼在湯姆森發現『電子』之後,『原子』的面紗也已經逐漸揭開以來,又要如何量測一個『電子』的電荷量的呢?這就是科學史上著名的『油滴實驗』Oil-drop experiment,是美國物理學家羅伯特‧密立根 Robert Millikan 與哈維‧福萊柴爾 Harvey Fletcher 在一九零九年所進行的一項物理學實驗。密立根並因此獲得一九二三年的諾貝爾物理學獎。
羅 伯特‧密立根在諾貝爾獎頒獎典禮上,表示他的計算值為  靜庫侖,約等於
靜庫侖,約等於  庫侖。現今已知的數值與密立根的結果差異小於百分之一,但是仍然比密立根測量結果的『標準誤差』 standard error 大了五倍,因此具有統計學上的顯著差異。在密立根油滴實驗六十年後,科學史學家發現,密立根一共向外公布了五十八次觀測數據,而他本人一共做過一百四十次觀測。他在實驗中先通過預先估測,去掉了那些他認為有偏差,以及誤差大的數據。
庫侖。現今已知的數值與密立根的結果差異小於百分之一,但是仍然比密立根測量結果的『標準誤差』 standard error 大了五倍,因此具有統計學上的顯著差異。在密立根油滴實驗六十年後,科學史學家發現,密立根一共向外公布了五十八次觀測數據,而他本人一共做過一百四十次觀測。他在實驗中先通過預先估測,去掉了那些他認為有偏差,以及誤差大的數據。
一九七四年美國大物理學家理查‧費曼 Richard Phillips Feynman 曾經在『加州理工學院』 California Institute of Technology 的一場畢業典禮演說當中述說『草包族科學』Cargo cult science,他其中有一段講:
從 過往的經驗,我們學到了如何應付一些自我欺騙的情況。舉個例子,密立根做了個油滴實驗,量出了電子的帶電量,得到一個今天我們知道是不大對的答案。他的資 料有點偏差,因爲他用了個不準確的空氣粘滯係數數值。於是,如果你把在密立根之後、進行測量電子帶電量所得到的資料整理一下,就會發現一些很有趣的現象: 把這些資料跟時間畫成座標圖,你會發現這個人得到的數值比密立根的數值大一點點,下一個人得到的資料又再大一點點,下一個又再大上一點點,最後,到了一個 更大的數值才穩定下來。
為 什麼他們沒有在一開始就發現新數值應該較高?── 這件事令許多相關的科學家慚愧臉紅 ── 因為顯然很多人的做事方式 是:當他們獲得一個比密立根數值更高的結果時,他們以為一定哪裡出了錯,他們會拚命尋找,並且找到了實驗有錯誤的原因。另一方面,當他們獲得的結果跟密立 根的相仿時,便不會那麼用心去檢討。因此,他們排除了所謂相差太大的資料,不予考慮。我們現在已經很清楚那些伎倆了,因此再也不會犯同樣的毛病。
─── 引自《【Sonic π】電聲學導引《三》》
不知到底敵過敵不過『心理詐術』的耶!!
然而『費曼』他打開了『古典力學』通達薛丁格之『波動方程式』之路逕,再一次的將『時‧空』的角色平等『對應定位』起來,

Annemarie and Erwin Schrödinger’s gravesite; above the name plate Schrödinger’s quantum mechanical wave equation is inscribed:

Richard Feynman at the Robert Treat Paine Estate in Waltham, MA, in 1984.
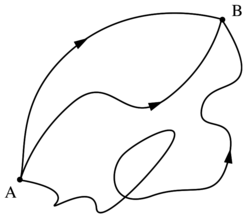
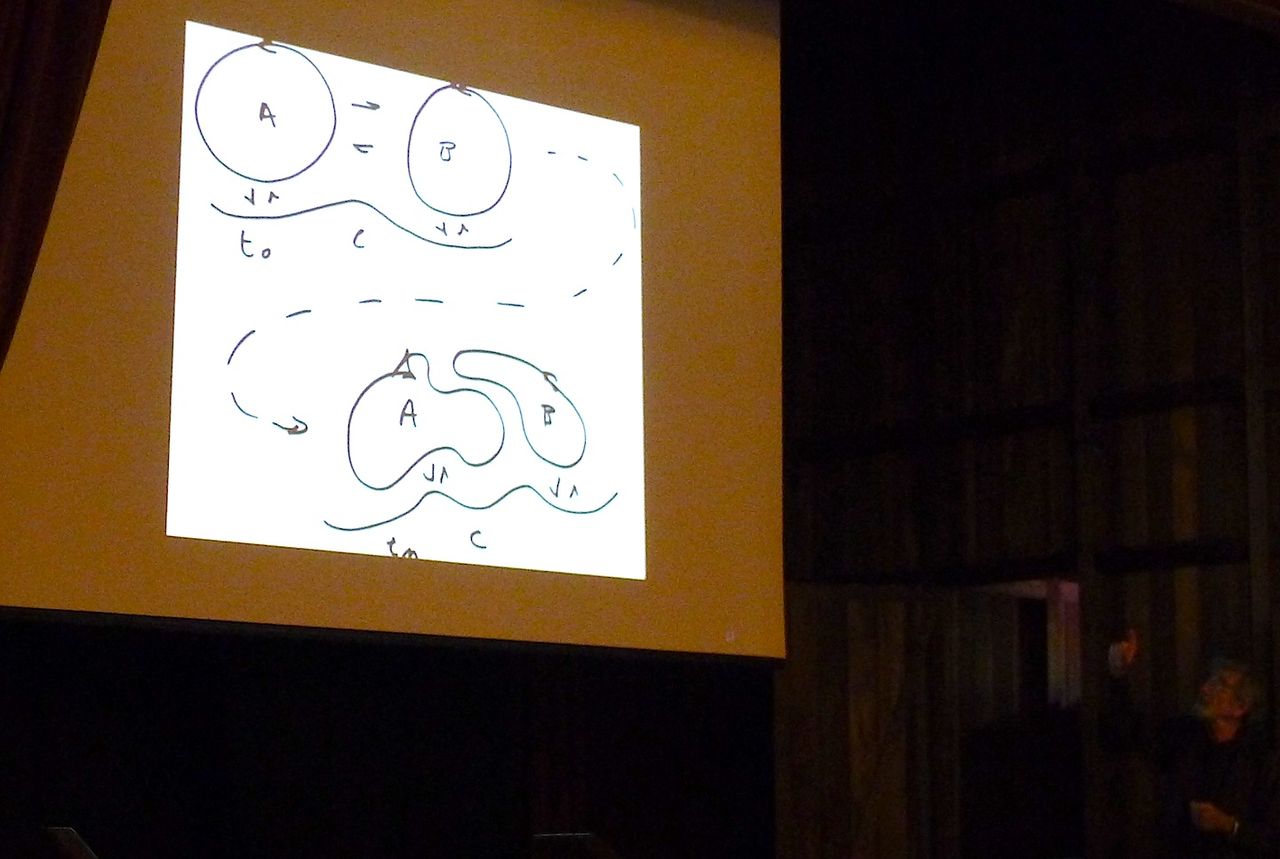
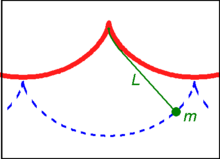
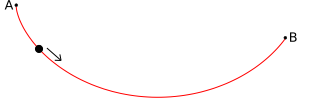
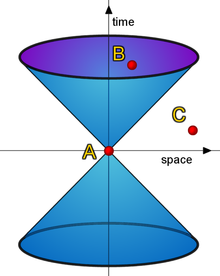
These are just three of the paths that contribute to the quantum amplitude for a particle moving from point A at some time t0 to point B at some other time t1.

The diagram shows the contribution to the path integral of a free particle for a set of paths.
Path integral formulation
Feynman’s interpretation
Dirac’s work did not provide a precise prescription to calculate the sum over paths, and he did not show that one could recover the Schrödinger equation or the canonical commutation relations from this rule. This was done by Feynman.[4]
Feynman showed that Dirac’s quantum action was, for most cases of interest, simply equal to the classical action, appropriately discretized. This means that the classical action is the phase acquired by quantum evolution between two fixed endpoints. He proposed to recover all of quantum mechanics from the following postulates:
- The probability for an event is given by the modulus length squared of a complex number called the “probability amplitude”.
- The probability amplitude is given by adding together the contributions of all paths in configuration space.
- The contribution of a path is proportional to
 , where S is the action given by the time integral of the Lagrangian along the path.
, where S is the action given by the time integral of the Lagrangian along the path.
In order to find the overall probability amplitude for a given process, then, one adds up, or integrates, the amplitude of postulate 3 over the space of all possible paths of the system in between the initial and final states, including those that are absurd by classical standards. In calculating the amplitude for a single particle to go from one place to another in a given time, it is correct to include paths in which the particle describes elaborate curlicues, curves in which the particle shoots off into outer space and flies back again, and so forth. The path integral assigns to all these amplitudes equal weight but varying phase, or argument of the complex number. Contributions from paths wildly different from the classical trajectory may be suppressed by interference (see below).
Feynman showed that this formulation of quantum mechanics is equivalent to the canonical approach to quantum mechanics when the Hamiltonian is quadratic in the momentum. An amplitude computed according to Feynman’s principles will also obey the Schrödinger equation for the Hamiltonian corresponding to the given action.
The path integral formulation of quantum field theory represents the transition amplitude (corresponding to the classical correlation function) as a weighted sum of all possible histories of the system from the initial to the final state. And Feynman diagram is a graphical representation of a perturbative contribution to the transition amplitude.
也許『人性』最平凡的詮釋,就是從『眾』到唯『我』間,無窮之『可能性』的吧!?
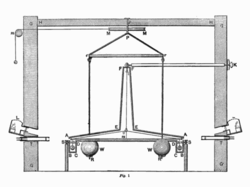
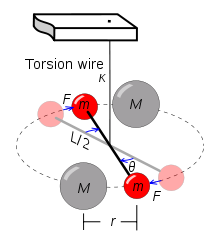


 是扭秤的自然共振周期,
是扭秤的自然共振周期, 是地球密度。
是地球密度。 ,與今天的測量數值差距約為百分之一
,與今天的測量數值差距約為百分之一


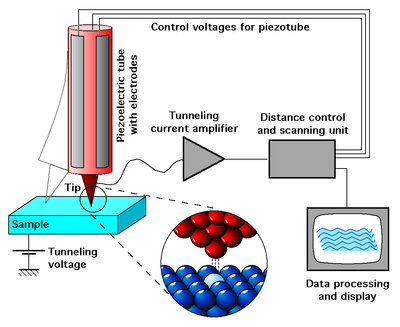

 』的低溫下,可以利用『探針尖端』精確的『操縱原子』,故為『奈米科技』中的重要『量測儀器』和『加工工具』。
』的低溫下,可以利用『探針尖端』精確的『操縱原子』,故為『奈米科技』中的重要『量測儀器』和『加工工具』。 表面上的形貌影像。
表面上的形貌影像。


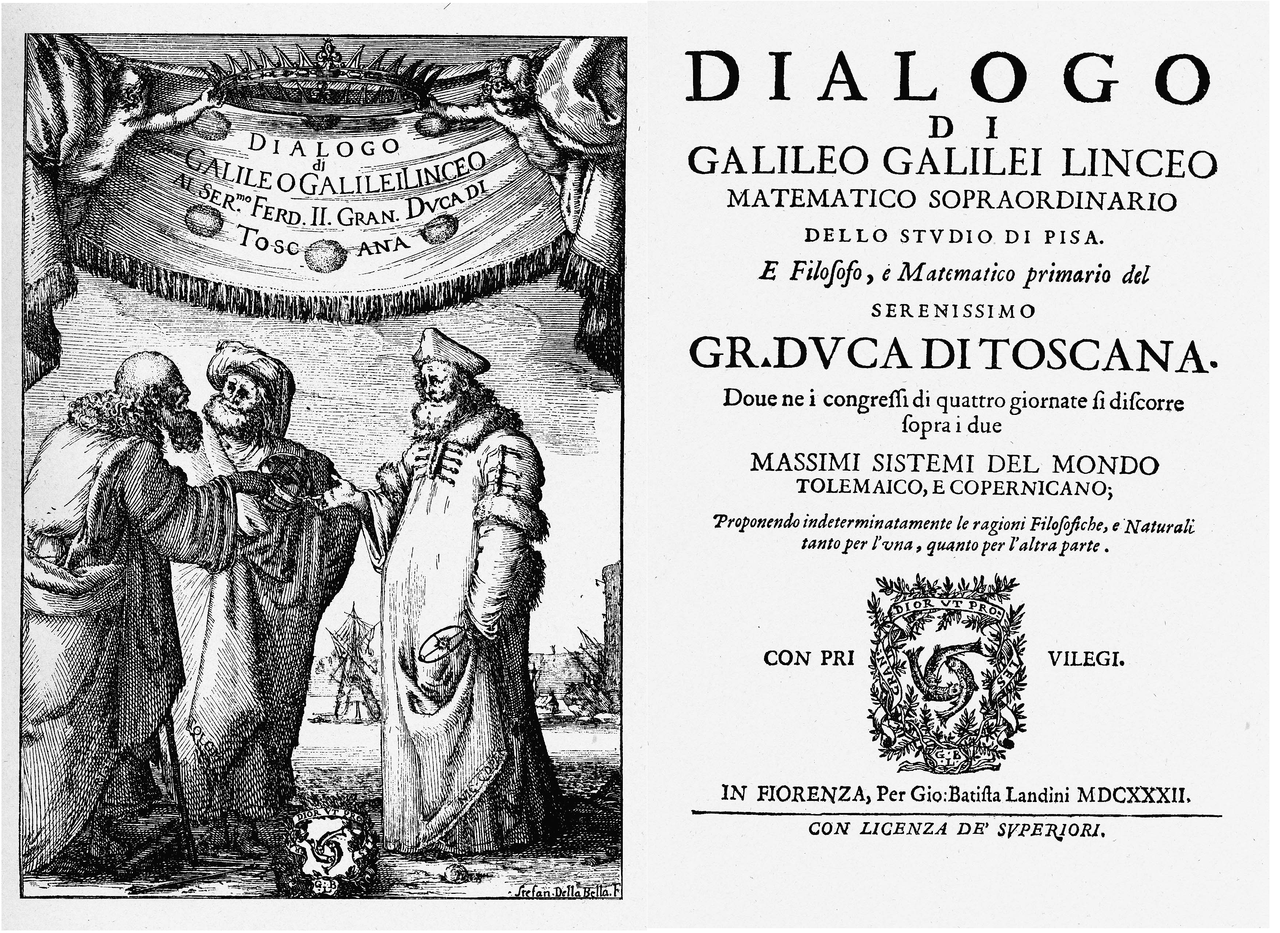

 ,難道不是這樣的嗎?一六三二年伽利略用義大利文撰寫了一部天文學著作,英文譯作『
,難道不是這樣的嗎?一六三二年伽利略用義大利文撰寫了一部天文學著作,英文譯作『

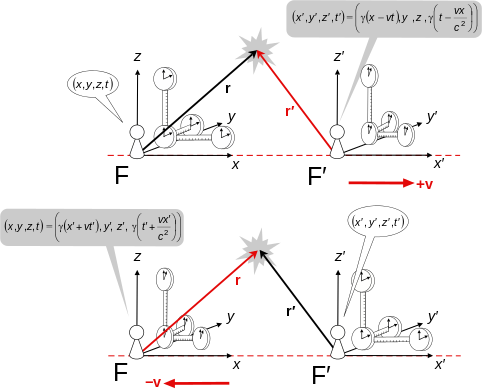


 的『定義』
的『定義』  與『相對速度』是
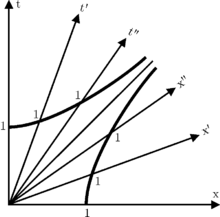
與『相對速度』是  上,一個與『粒子偕行』相對『靜止』的『觀察者』,就把『我的運動』畫在『他的時空圖』
上,一個與『粒子偕行』相對『靜止』的『觀察者』,就把『我的運動』畫在『他的時空圖』  上的了。這個『互為動靜』的『論述』就是『相對運動』的『實質』,並不存在『絕對運動』的啊。所以『我說』『那個粒子』在
上的了。這個『互為動靜』的『論述』就是『相對運動』的『實質』,並不存在『絕對運動』的啊。所以『我說』『那個粒子』在  『時刻』『接近』
『時刻』『接近』  『位置』,當
『位置』,當  『時』『到達』
『時』『到達』  『處』,於
『處』,於  『之後』『離開』
『之後』『離開』  『之地』,『我』將此『等速運動』歸之於『粒子』的『運動慣性』;那個與『粒子偕行』相對『靜止』的『觀察者』亦將此『等速運動』歸之於『我』的『運動慣性』,這就是『運動』之『慣性』的『第一義』。所謂『
『之地』,『我』將此『等速運動』歸之於『粒子』的『運動慣性』;那個與『粒子偕行』相對『靜止』的『觀察者』亦將此『等速運動』歸之於『我』的『運動慣性』,這就是『運動』之『慣性』的『第一義』。所謂『 ,或者比喻的說︰
,或者比喻的說︰
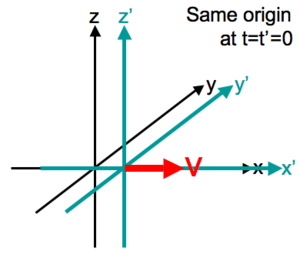
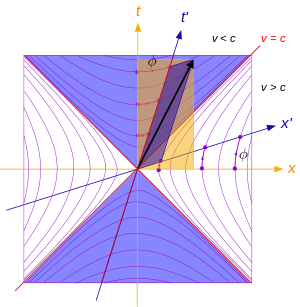
 對『□觀察者』是『靜止』的,然而對『○觀察者』而言,是
對『□觀察者』是『靜止』的,然而對『○觀察者』而言,是  和
和  ,它以『速度』
,它以『速度』  與
與  ,對『○觀察者』而言,是
,對『○觀察者』而言,是  和
和  也是『同時的』。既然『運動是相對的』,假使我們以『○觀察者』為『靜止』,來作個『伽利略變換』的『物理檢驗』, 那麼
也是『同時的』。既然『運動是相對的』,假使我們以『○觀察者』為『靜止』,來作個『伽利略變換』的『物理檢驗』, 那麼  當是應該的了。也就是說
當是應該的了。也就是說  ,讀者自己可以『確證』
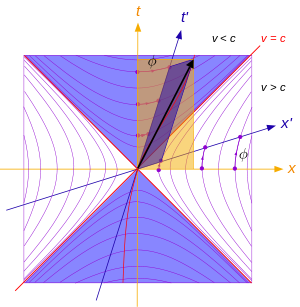
,讀者自己可以『確證』  它的『正確性』。也可以說『物理之要求』不得不決定了『數學的表達式』的吧!,所謂的『自然律』並不『必須』要『滿足』這種或那種『數學』的耶!!如果說『○觀察者』觀測某一個『星辰』
它的『正確性』。也可以說『物理之要求』不得不決定了『數學的表達式』的吧!,所謂的『自然律』並不『必須』要『滿足』這種或那種『數學』的耶!!如果說『○觀察者』觀測某一個『星辰』  用
用  的『速度』向右『直線運動』,那麼這一個『星辰』相對於『□觀察者』的『速度』是什麼的呢?『直覺上』我們認為既然『
的『速度』向右『直線運動』,那麼這一個『星辰』相對於『□觀察者』的『速度』是什麼的呢?『直覺上』我們認為既然『



 來看的呢?
來看的呢? 『位置相關項』的『存在』而被『破壞』了;然而物理所要求的『相對性』
『位置相關項』的『存在』而被『破壞』了;然而物理所要求的『相對性』  依然成立。那個『相對速度』之『加法』就顯然非常『違反直覺』的成了
依然成立。那個『相對速度』之『加法』就顯然非常『違反直覺』的成了![L_w \cdot L_v = L_{w \bigoplus v} = \frac{1}{\sqrt{1 - {[\frac{(w+v)/c}{1+(wv/c^2)}]}^2}} \begin{pmatrix} 1 & -[\frac{(w+v)}{1+(wv/c^2)}] \\ -\frac{1}{c^2} {[\frac{(w+v)}{1+(wv/c^2)}]}^2 & 1 \end{pmatrix} \begin{bmatrix} x_{\Box} \\ t_{\Box} \end{bmatrix}](http://www.freesandal.org/wp-content/ql-cache/quicklatex.com-7e1d36e8349d42efeb7109c46d355355_l3.png "Rendered by QuickLaTeX.com")

 的話,那麼
的話,那麼  這又能有什麼『不對』的嗎?因是之故,『狹義相對論』所帶來的『困惑』遠勝於『運動之不可能性』,反倒以為『運動』果真能是這種『現象』的嘛!!
這又能有什麼『不對』的嗎?因是之故,『狹義相對論』所帶來的『困惑』遠勝於『運動之不可能性』,反倒以為『運動』果真能是這種『現象』的嘛!!


 –水的
–水的

 –絕對溼度,單位是公克/立方公尺
–絕對溼度,單位是公克/立方公尺 –最高溼度,單位是公克/立方公尺
–最高溼度,單位是公克/立方公尺

 和
和
 和
和

 –質量,單位為公克
–質量,單位為公克 –密度,單位為公克/立方公尺
–密度,單位為公克/立方公尺 –溼空氣的總體積,單位為立方公尺
–溼空氣的總體積,單位為立方公尺 –干空氣的氣體常數,單位為焦耳/(公斤·開爾文)
–干空氣的氣體常數,單位為焦耳/(公斤·開爾文) –水的
–水的 –干空氣的
–干空氣的